

















Photo
20200084_0035
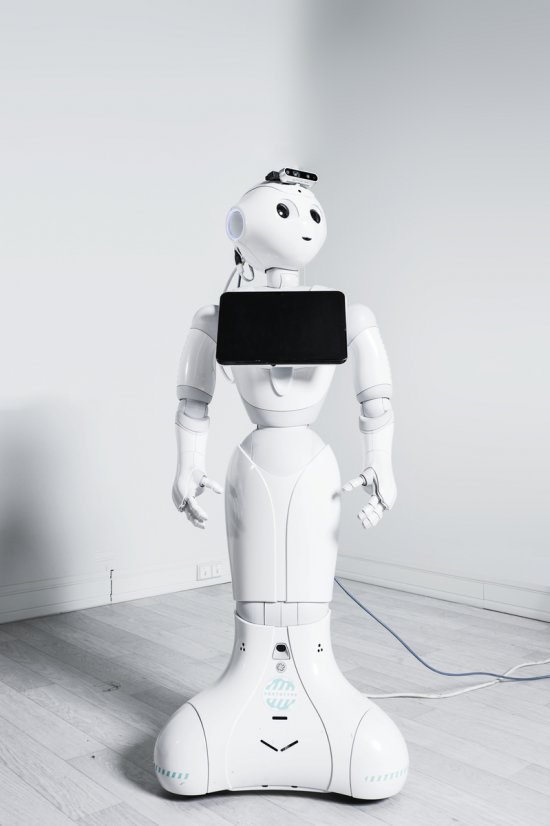
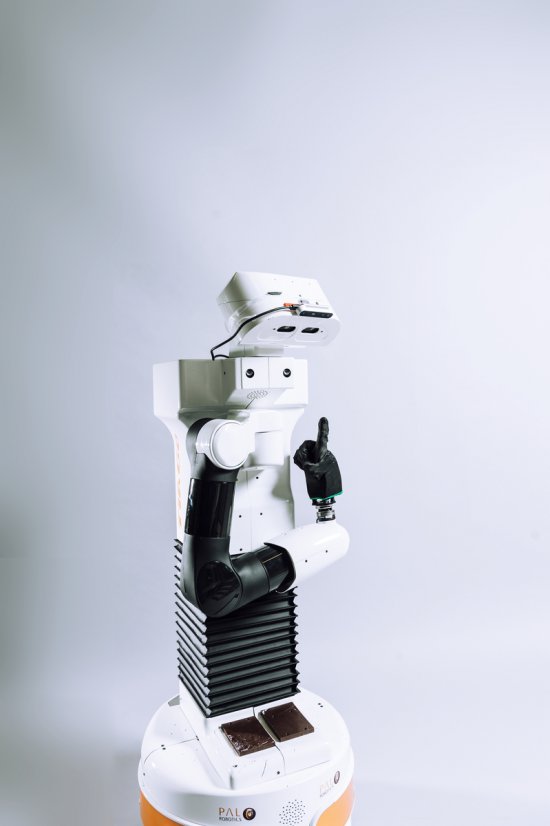
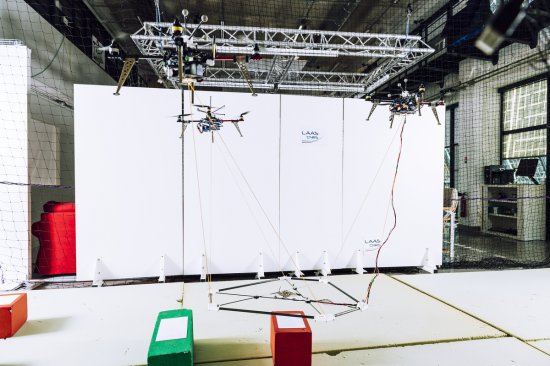
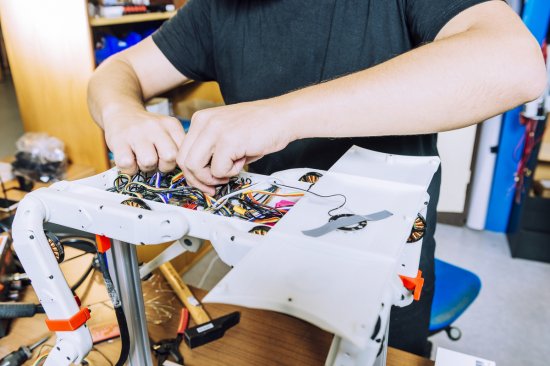
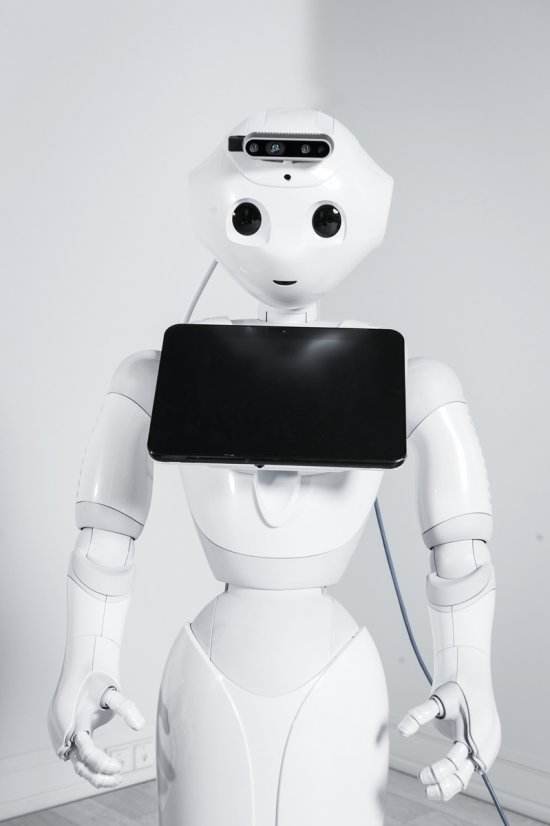
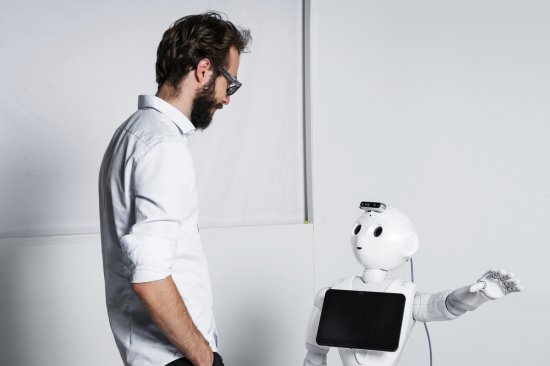
Robot Pepper au Laboratoire d'analyse et d'architecture des systèmes (LAAS-CNRS)


Photo
20200084_0040
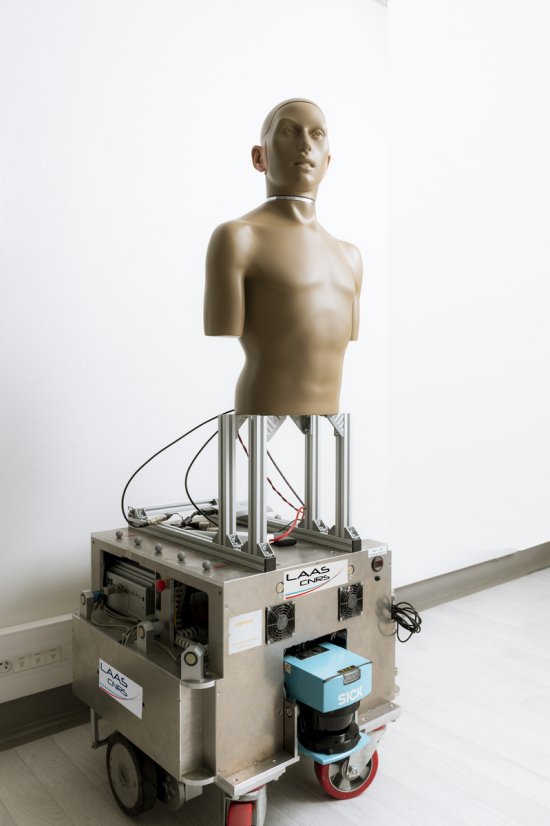
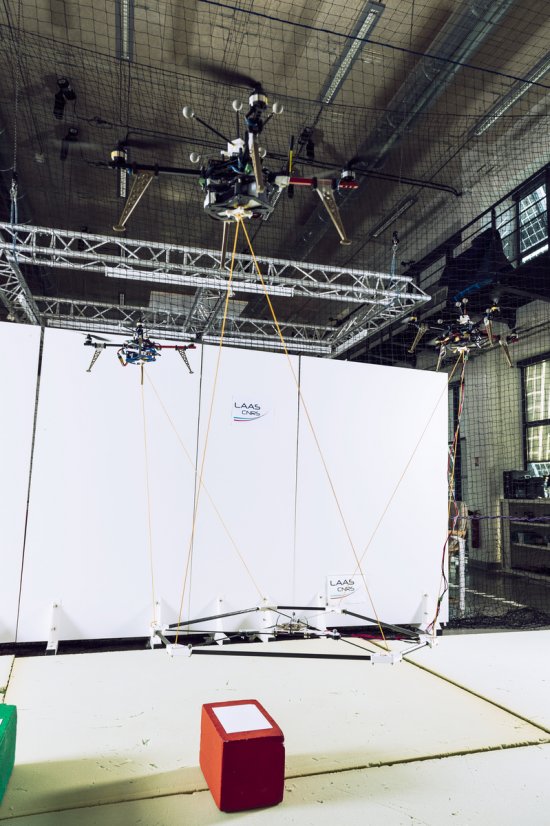
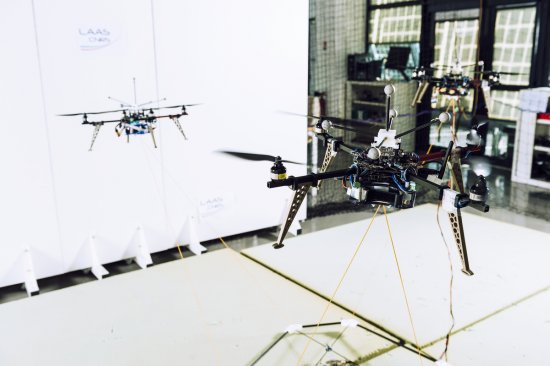
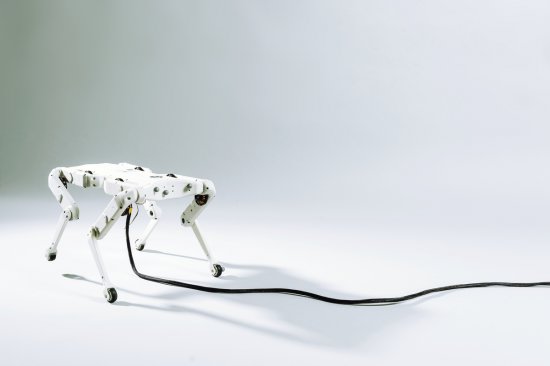
Robot Pepper au Laboratoire d'analyse et d'architecture des systèmes (LAAS-CNRS)