Année de production
2020

© Cyril FRESILLON / LAAS / CNRS Images
20200084_0056
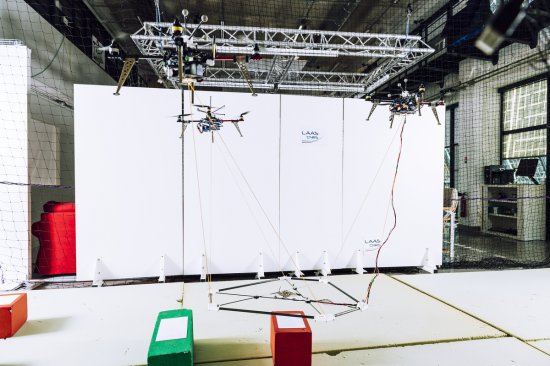
Supervision de la manipulation sur le bloc de taille du robot de taille de vigne R2T2, dans une salle de laboratoire. R2T2 est un robot agricole autonome capable de se déplacer dans un vignoble pour tailler de manière appropriée chaque pied de vigne. A l’arrière-plan, le robot monté sur un cadre temporaire est testé sur un faux cep de vigne, conçu et imprimé en 3D par le LAAS-CNRS. Il est localisé dans la scène grâce à un système de capture de mouvement constitué d'un réseau de caméras et de marqueurs réfléchissants disposés sur le pied de vigne. Grâce à cette localisation très précise, les bras manipulateurs sont capables d'aller se positionner sur des points de coupe, en calculant à la volée un mouvement sans collisions (avec la vigne ou les fils) et optimal par rapport à leur capacités (vitesse, efforts maximums par exemple). Dans ce contexte, le savoir-faire des scientifiques du LAAS-CNRS est essentiellement focalisé sur ce dernier point, avec le défi supplémentaire que les bras manipulateurs considérés ici sont de type industriel. Ils ont la particularité d'être très rapides et robustes mais ne sont pas initialement conçus pour être pilotés par des logiciels externes. L’utilisation d’un robot pour la taille de vigne vise notamment à réduire la pénibilité du travail sur les exploitations viticoles.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2020
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.