Programme(s)
Année de production
2020

© Cyril FRESILLON / LAAS / CNRS Images
20200084_0005
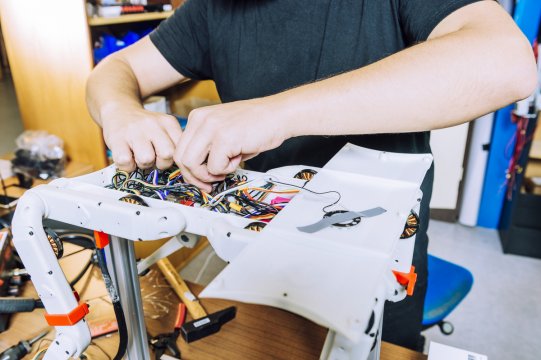
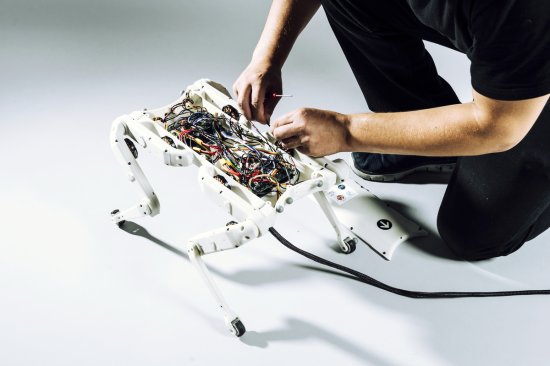
Préparation de moteurs de modélisme modifiés pour les besoins du robot Solo 8. Grâce à une commande vectorielle, il est possible d'implémenter des lois de contrôles dites "en efforts" pour ce type de moteur. Solo 8 est un robot quadrupède en libre accès développé par le Max Planck Institute en collaboration avec le LAAS-CNRS dans le cadre du projet "Open Dynamic Robot Initiative". Le laboratoire l'utilise pour étudier la locomotion des robots à pattes.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2020
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.