Programme(s)
Année de production
2020

© Cyril FRESILLON / LAAS / CNRS Images
20200084_0050
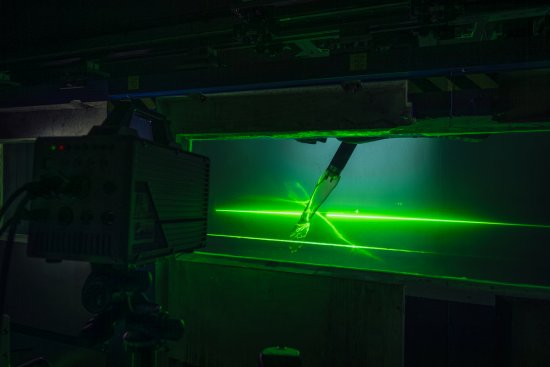
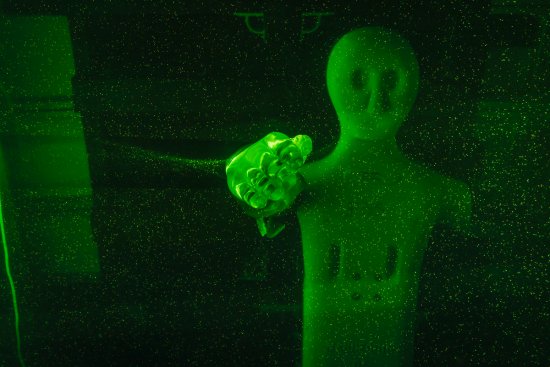
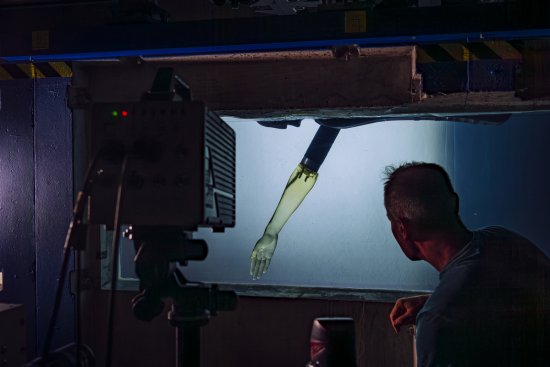
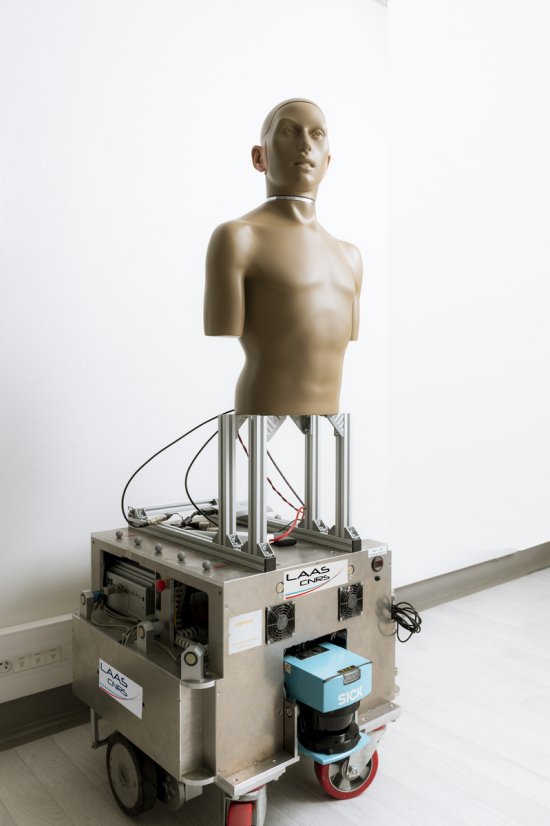
Mannequin anthropomorphe pour simulation acoustique KEMAR monté sur le robot Two!Ears. Ce robot mobile est capable de réaliser la localisation binaurale (sur la base de deux oreilles) horizontale de sources sonores. Il a été développé par le LAAS-CNRS dans le cadre du projet européen de psychoacoustique du même nom, dont l’objectif est de caractériser la perception humaine dans sa dimension active, exploratoire. Two!Ears se déplace et bouge la tête afin de repérer une source sonore, reproduisant ainsi le fonctionnement de l’être humain, qui combine la perception du son et le mouvement du corps. Lorsque l’on analyse une scène auditive, on a en effet tendance à bouger parce qu’il est plus efficace de placer la source sonore à l’intérieur du périmètre où l’on est plus sensible à l’origine spatiale du son, et à se rapprocher de la source afin de la localiser.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2020
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.