Programme(s)
Année de production
2020

© Cyril FRESILLON / LAAS / CNRS Images
20200084_0026
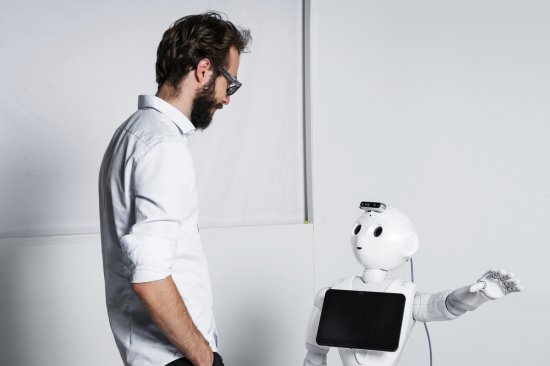
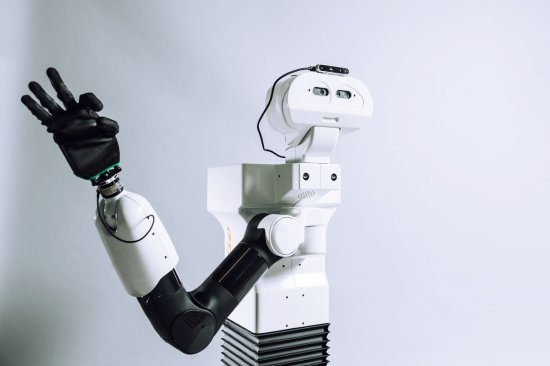
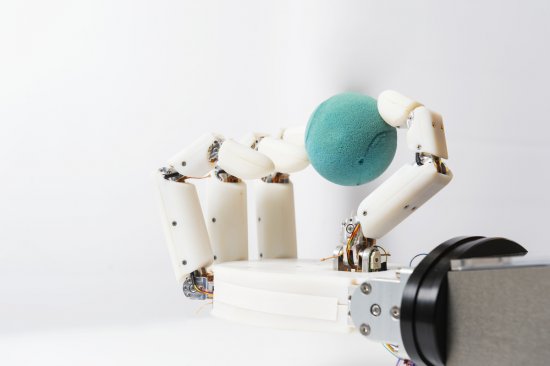
PR2, un robot de service autonome, et un scientifique réalisent une tâche en commun : déplacer un cube. PR2 prend l'objet car son partenaire humain est trop éloigné de l'étagère. Il le tendra ensuite au scientifique pour qu’il le range. Chaque objet est associé à un marqueur repère Aruco, facilement détectable depuis l’image des caméras, qui permet à PR2 de le localiser et le reconnaître sans utiliser un algorithme de perception complexe et lent. Ce test s’inscrit dans les recherches du LAAS-CNRS sur l’interaction humain-machine. Pour permettre à PR2 de collaborer avec une personne, il est nécessaire de pourvoir le robot de capacités de compréhension et d'adaptation à l’humain, de le rendre capable de raisonner en fonction de son environnement et son utilisateur, d’estimer ses capacités d’action, de communiquer, etc. Dans cette optique, le LAAS-CNRS développe des composants logiciels à différents niveaux dans l'architecture robotique (perception, planification de mouvement, navigation, planification de tâches, mémoire à long terme, supervision, etc.). PR2 est développé par l’université de Berkeley et la société Willow Garage.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2020
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.