Research program(s)
Production year
2020

© Cyril FRESILLON / LAAS / CNRS Images
20200084_0026
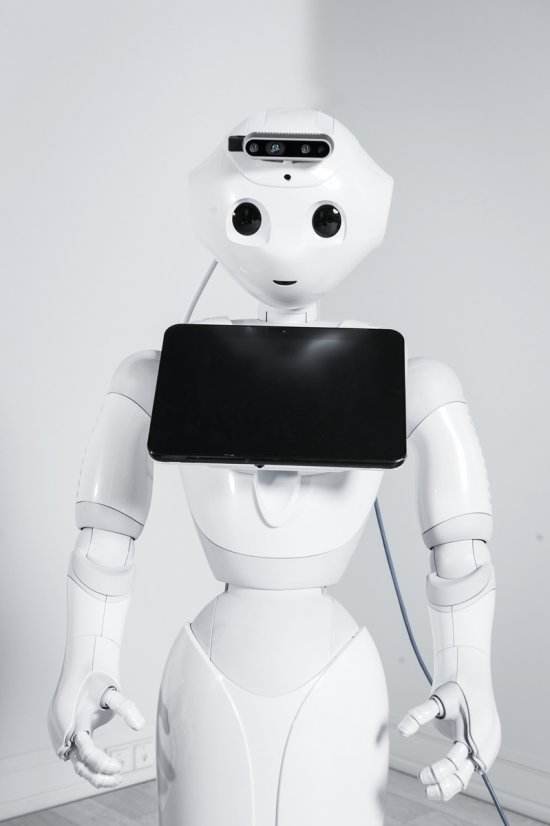
PR2, un robot de service autonome, et un scientifique réalisent une tâche en commun : déplacer un cube. PR2 prend l'objet car son partenaire humain est trop éloigné de l'étagère. Il le tendra ensuite au scientifique pour qu’il le range. Chaque objet est associé à un marqueur repère Aruco, facilement détectable depuis l’image des caméras, qui permet à PR2 de le localiser et le reconnaître sans utiliser un algorithme de perception complexe et lent. Ce test s’inscrit dans les recherches du LAAS-CNRS sur l’interaction humain-machine. Pour permettre à PR2 de collaborer avec une personne, il est nécessaire de pourvoir le robot de capacités de compréhension et d'adaptation à l’humain, de le rendre capable de raisonner en fonction de son environnement et son utilisateur, d’estimer ses capacités d’action, de communiquer, etc. Dans cette optique, le LAAS-CNRS développe des composants logiciels à différents niveaux dans l'architecture robotique (perception, planification de mouvement, navigation, planification de tâches, mémoire à long terme, supervision, etc.). PR2 est développé par l’université de Berkeley et la société Willow Garage.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2020
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.