Année de production
2020

© Cyril FRESILLON / LAAS / CNRS Images
20200084_0047
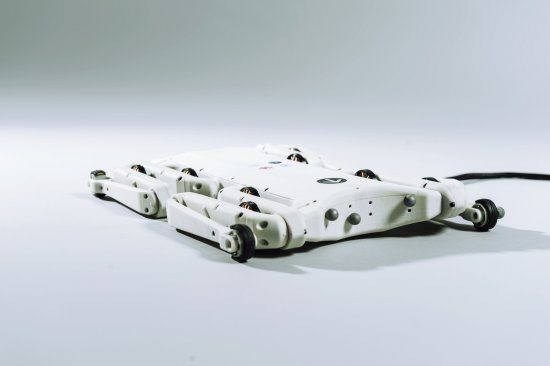
Test de Minnie, un robot mobile capable de percevoir son environnement à l’aide de la télédétection Lidar. Il s'agit d'un support expérimental pour mener des recherches sur l’autonomie des robots mobiles. Il permet au LAAS-CNRS d'étudier les différentes fonctions de base nécessaires à la navigation autonome : la perception de l’environnement, la localisation du robot, la génération et l'exécution des déplacements. Ces fonctions définissent des composants qui sont intégrés au sein d’une architecture logicielle, qui est elle-même l’objet de recherches dont l'objectif est de garantir le bon comportement du robot. Un modèle formel des composants qui exhibe leurs propriétés logiques et temporelles est nécessaire pour prouver que leur intégration satisfait un ensemble de propriétés globales, telles que l’arrêt devant un obstacle.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2020
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.