Programme(s)
Année de production
2020

© Cyril FRÉSILLON / ISIR / CNRS Images
20200021_0013
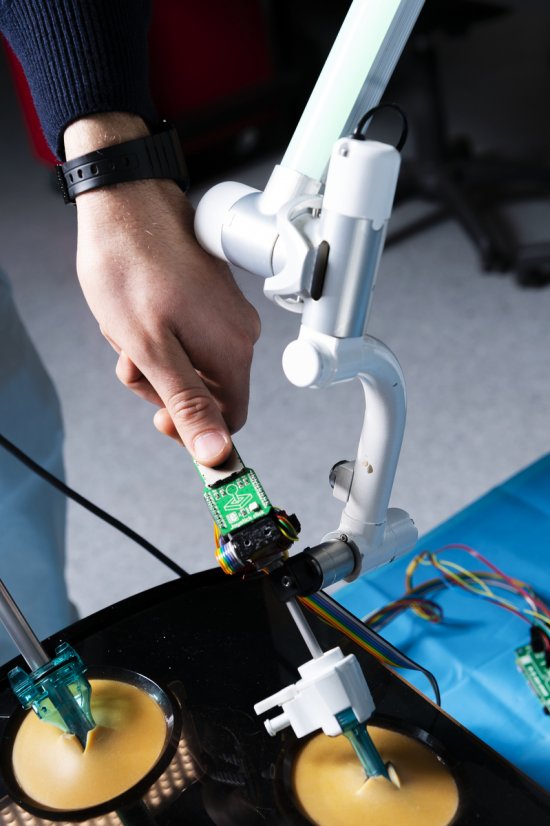
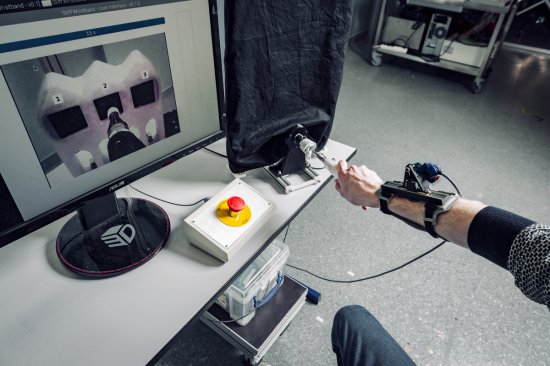
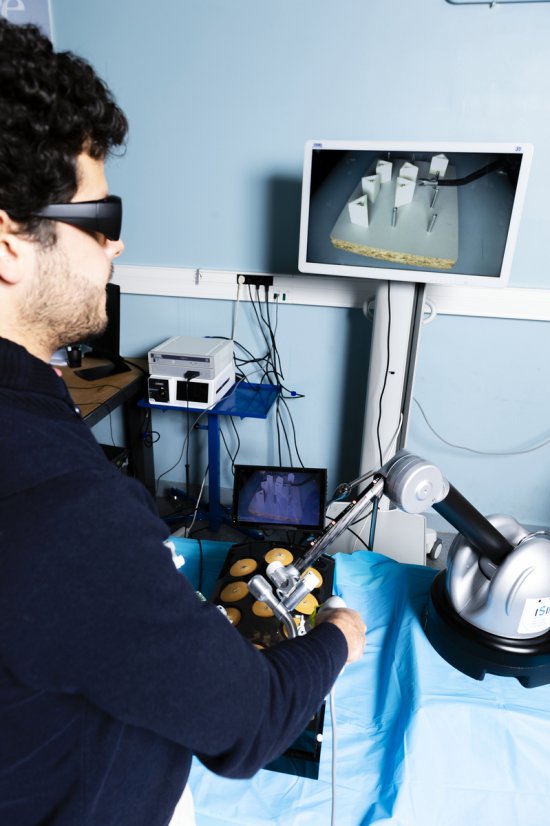
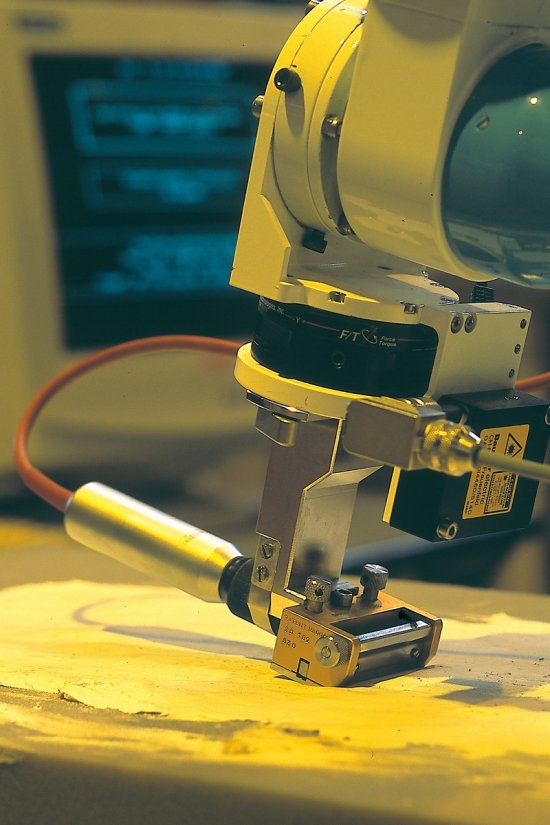
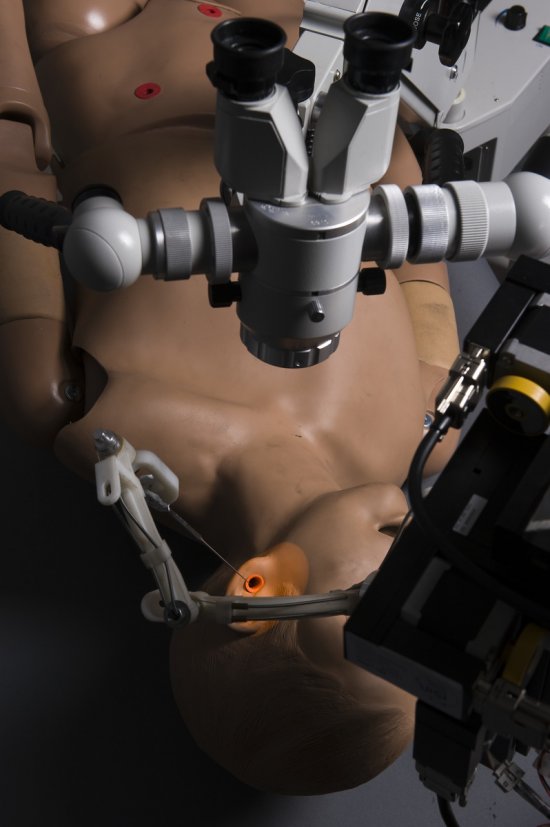
Prototype de robot médical pour le perçage chirurgical automatisé de vertèbre, développé par l’Institut des systèmes intelligents et de robotique (ISIR) et la société SpineGuard. Il est muni d’un foret "intelligent" équipé d’un capteur DSG (Dynamic surgical guidance) qui mesure la conductivité électrique des tissus à sa pointe. A partir de cette information, des algorithmes d'interprétation des données permettent de déduire la nature du tissu et d’envoyer un signal d’alerte si une brèche osseuse, source de complications pour le patient, est imminente. L’objectif est de prouver scientifiquement qu’un robot combiné à la technologie DSG peut détecter, de manière automatique et répétable, des brèches osseuses et ainsi de rendre possible le placement direct d’implants osseux par le robot lui-même de façon autonome. C’est un atout par rapport aux systèmes de navigation robotisés actuels, qui reposent sur un modèle 3D de la zone à opérer, réalisé avant l’opération.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2020
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.