Research program(s)
Production year
2020

© Cyril FRÉSILLON / ISIR / CNRS Images
20200021_0013
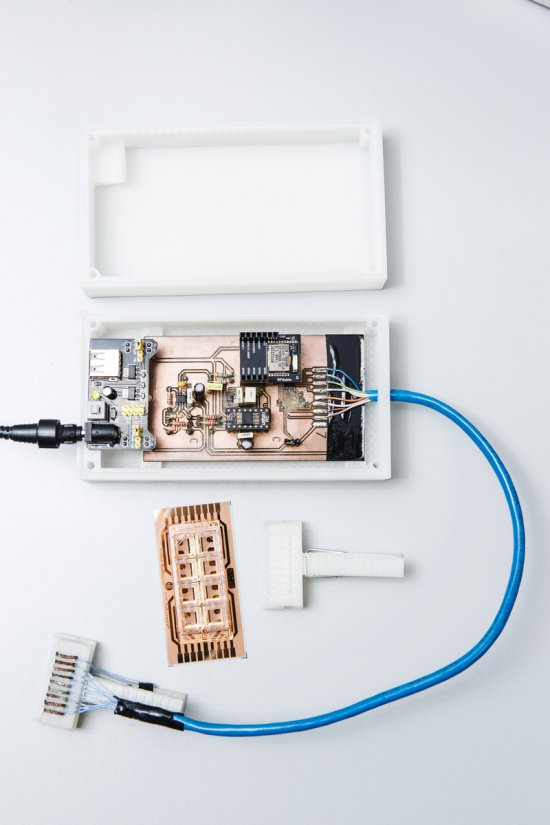
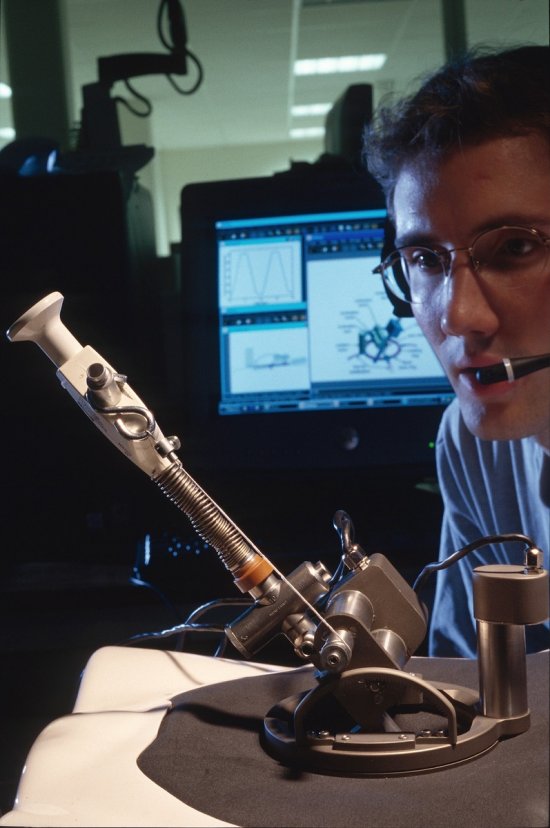
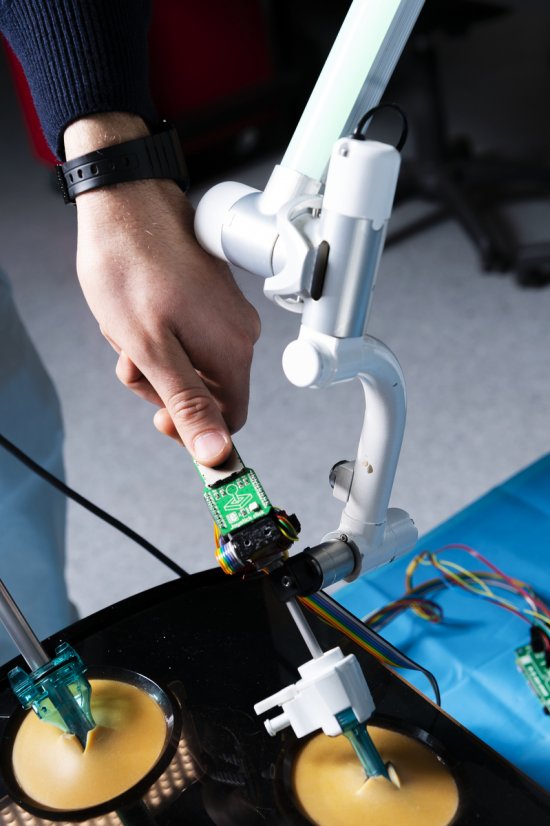
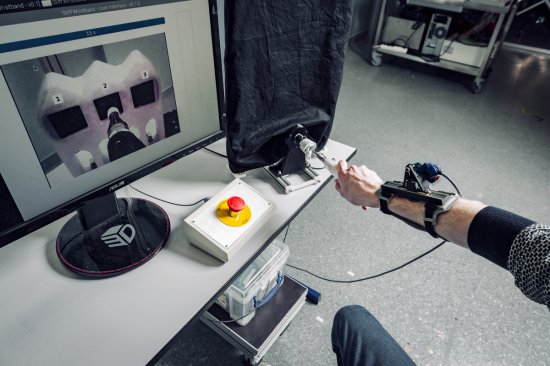
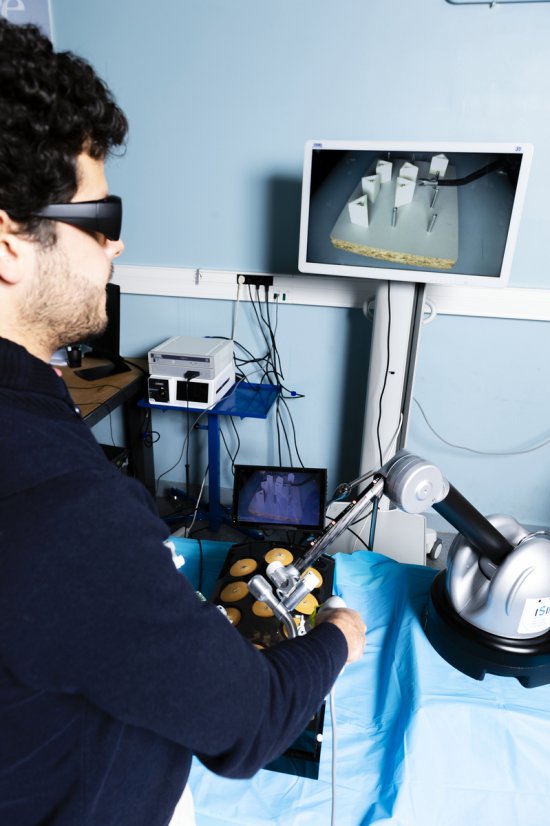
Prototype de robot médical pour le perçage chirurgical automatisé de vertèbre, développé par l’Institut des systèmes intelligents et de robotique (ISIR) et la société SpineGuard. Il est muni d’un foret "intelligent" équipé d’un capteur DSG (Dynamic surgical guidance) qui mesure la conductivité électrique des tissus à sa pointe. A partir de cette information, des algorithmes d'interprétation des données permettent de déduire la nature du tissu et d’envoyer un signal d’alerte si une brèche osseuse, source de complications pour le patient, est imminente. L’objectif est de prouver scientifiquement qu’un robot combiné à la technologie DSG peut détecter, de manière automatique et répétable, des brèches osseuses et ainsi de rendre possible le placement direct d’implants osseux par le robot lui-même de façon autonome. C’est un atout par rapport aux systèmes de navigation robotisés actuels, qui reposent sur un modèle 3D de la zone à opérer, réalisé avant l’opération.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2020
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.