Production year
2020

© Cyril FRÉSILLON / ISIR / CNRS Images
20200021_0001
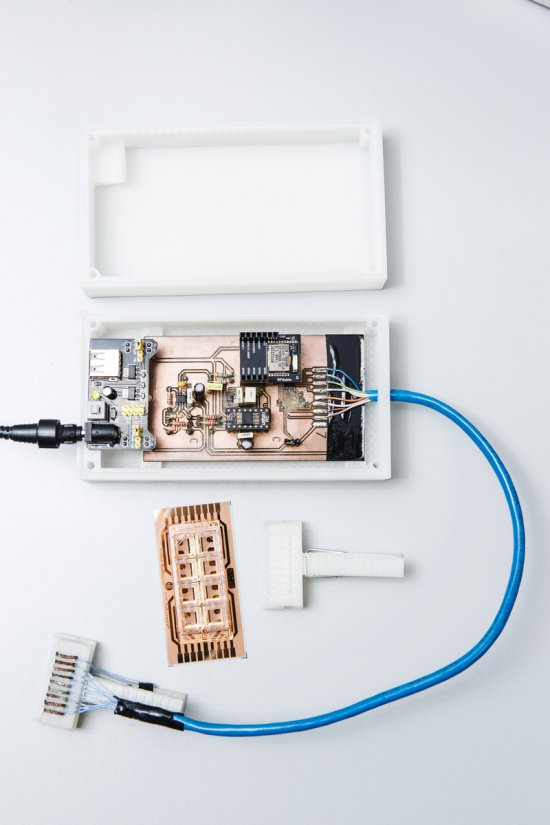
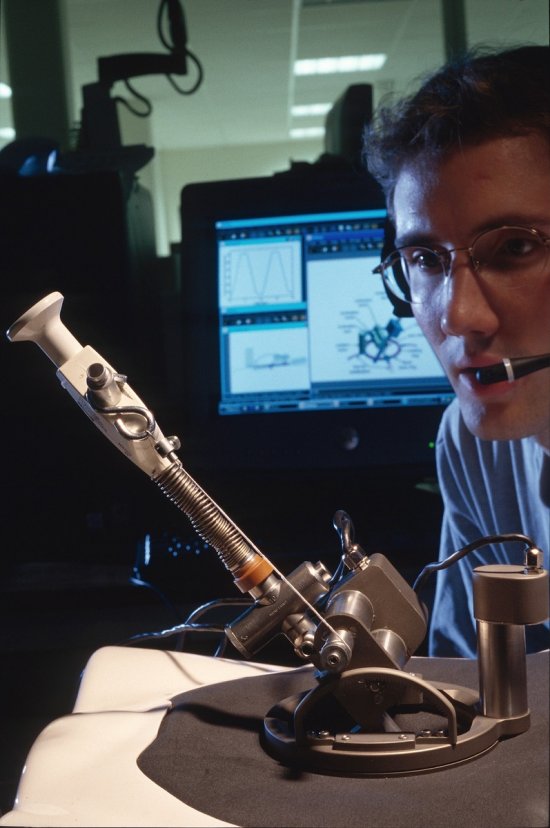
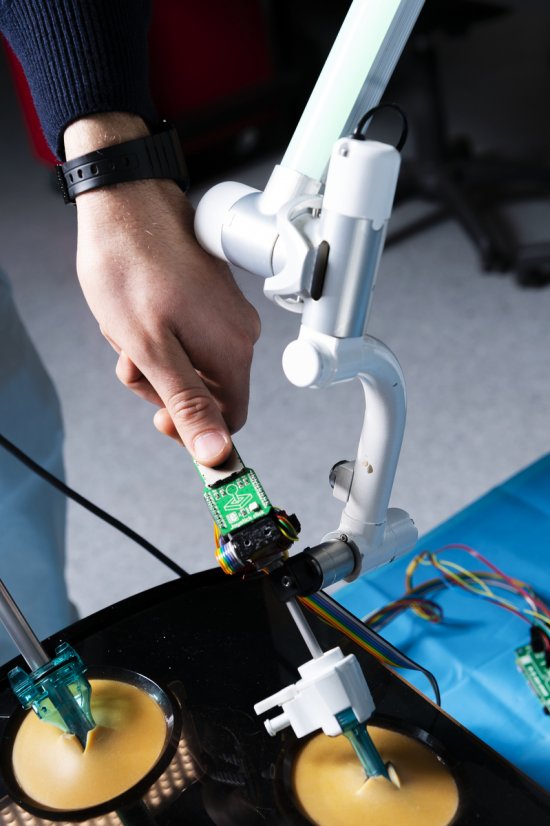
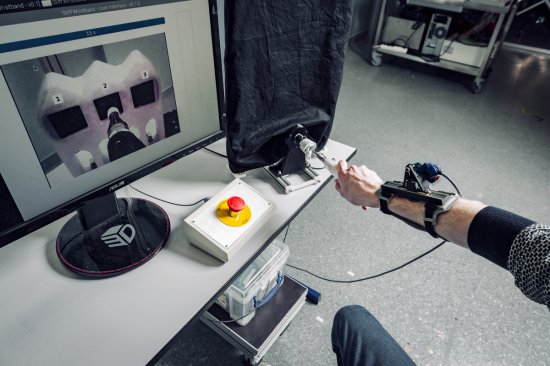
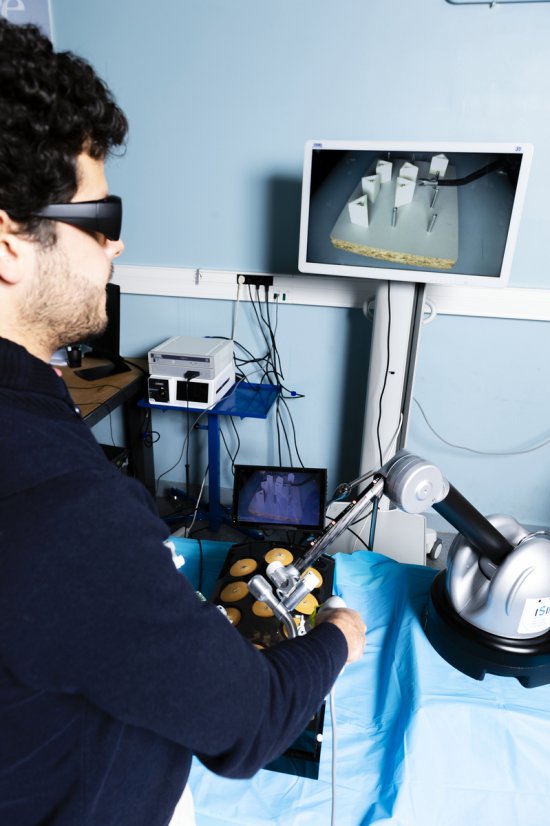
Test d’un système robotisé d’assistance à la chirurgie cœlioscopique. Cette technique permet d’observer l’intérieur de la cavité abdominale et d’intervenir sur les organes, grâce à des instruments (caméra et instruments chirurgicaux) insérés dans la paroi abdominale via de petites incisions. Elle réduit le risque de complications pour le patient mais comporte des spécificités pour le chirurgien : distorsion haptique (du sens du toucher), ergonomie, poids et encombrement des instruments, gestion de la caméra, etc. Ce système robotisé vise à améliorer le confort, l’autonomie et la précision du chirurgien lors des procédures. C’est le bras robotisé qui porte le poids des instruments, ce qui réduit le besoin d’un assistant, et qui positionne automatiquement la caméra de façon à avoir toujours la pointe de l’instrument au centre de l’image. Le robot filtre les tremblements de la main du chirurgien, qui peut également circonscrire la zone d’action des instruments grâce à la réalité augmentée.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2020
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.