Research program(s)
Production year
2020

© Cyril FRÉSILLON / ISIR / CNRS Images
20200021_0010
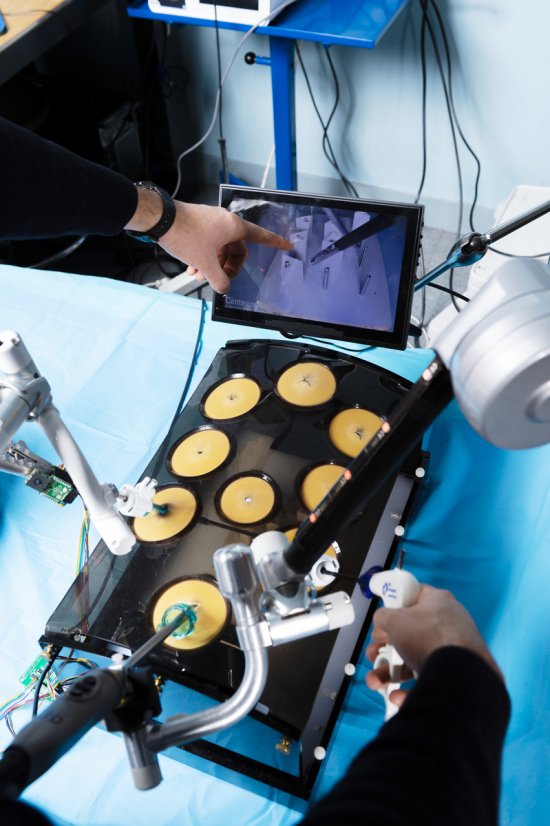
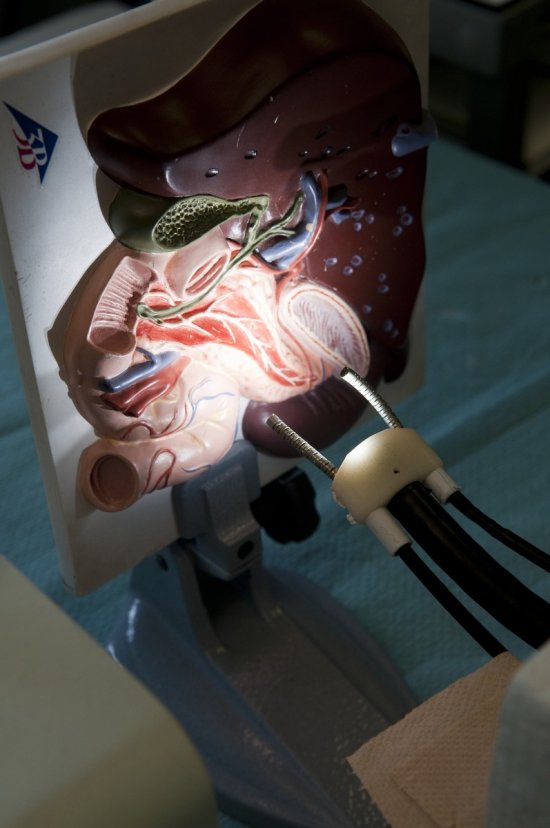
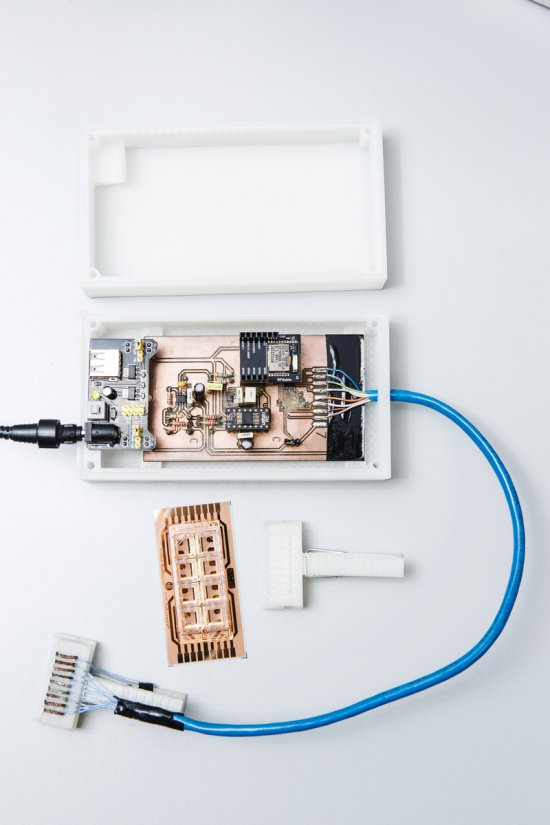
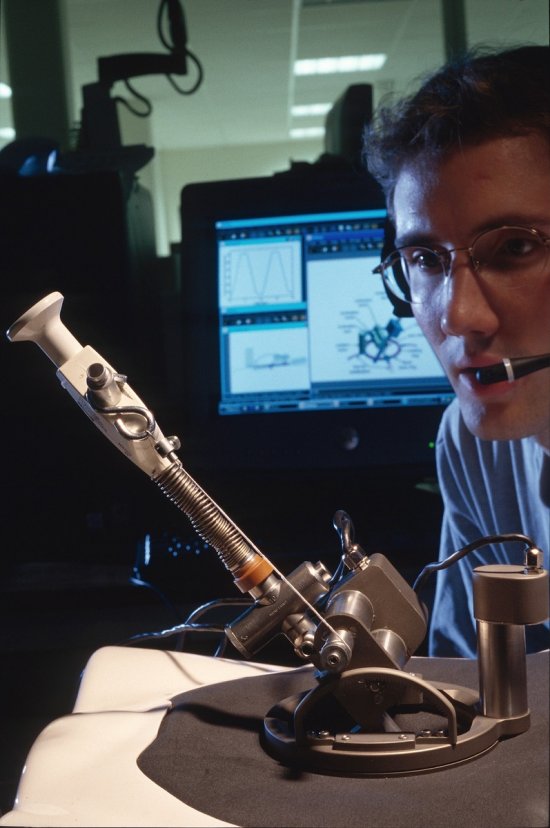
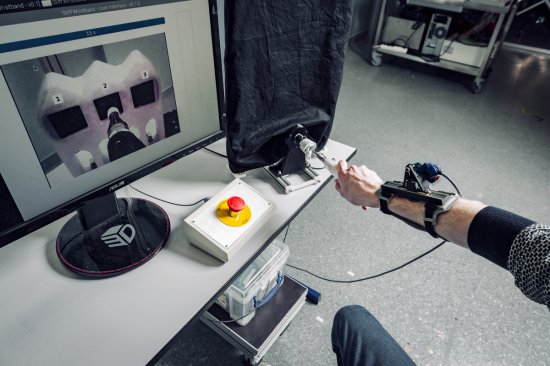
Test de manipulation d’un système robotisé d’assistance à la chirurgie du cholestéatome, une tumeur de l’oreille moyenne, sur un fantôme anatomique. A l’extrémité du bras porteur, un mini-robot de type endoscope actif possède deux mobilités adaptées à ce type de chirurgie. Sur cette image, l’opérateur a délaissé le joystick de téléopération (en gris) au profit de la comanipulation. Par rapport à une opération réalisée à la main, ce système pour la chirurgie ORL améliore la précision et la stabilité du geste, annulant les risques de tremblement et de fatigue de la main. Il améliore également l’accessibilité, puisque les mobilités intracorporelles contournent les obstacles (nerf facial, osselets, etc.) pour venir pointer sur des zones pathologiques de très petite surface.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2020
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.