Research program(s)
Production year
2020

© Cyril FRÉSILLON / ISIR / CNRS Images
20200021_0008
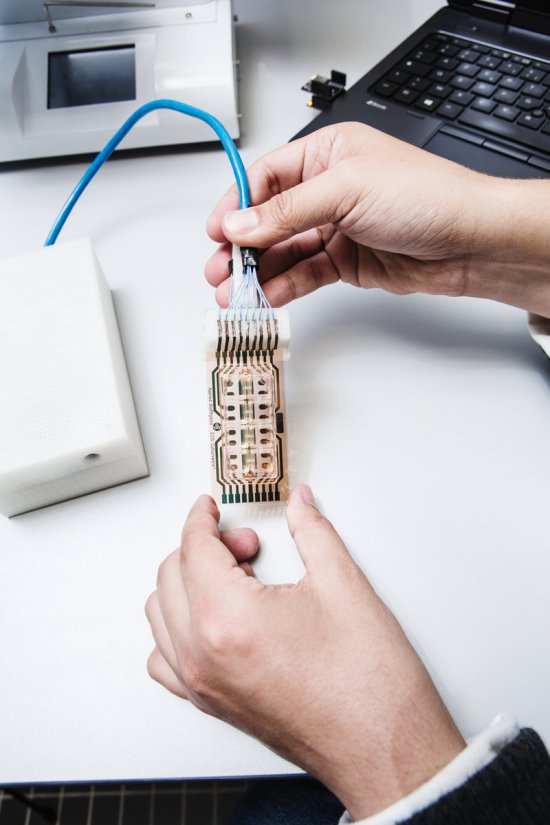
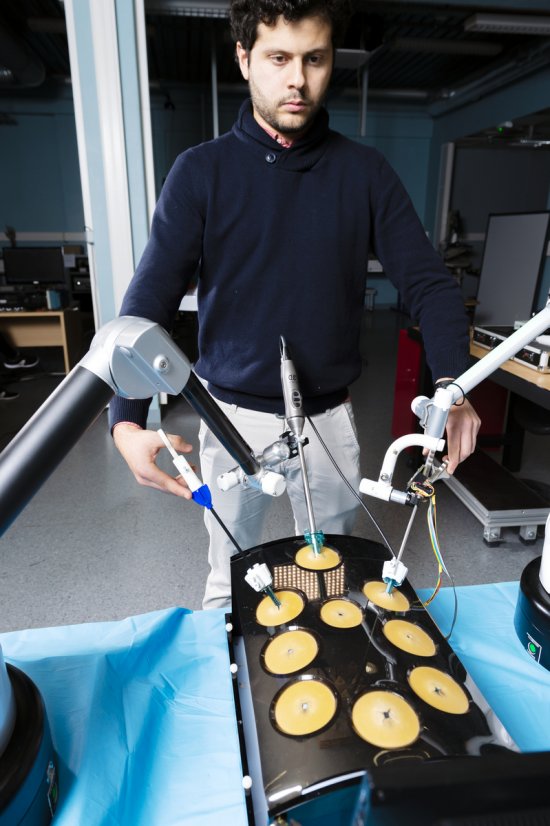
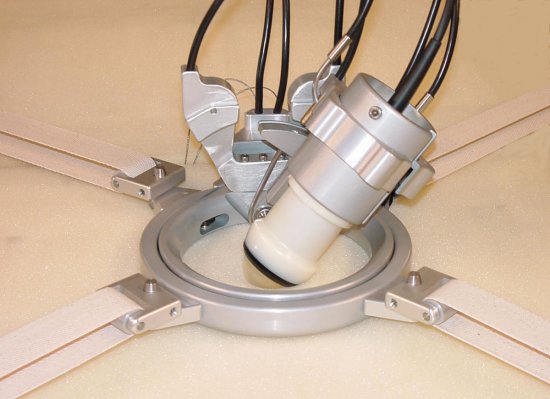
Validation expérimentale d’une loi de commande dite CCC (Compensation Cancellation Control) pour le pilotage d'une prothèse robotique de poignet avec une personne non amputée équipée à l'aide d'une orthèse, réalisant une épreuve du Cybathlon. Cette compétition destinée aux athlètes handicapés autorise l’utilisation de technologies d’assistance bionique. La prothèse n'est ici pas directement pilotée par le sujet mais cherche de façon autonome à annuler les mouvements de compensation du sujet lorsque celui-ci cherche à rectifier la mauvaise position ou la mauvaise orientation de la prothèse. Ainsi, lorsqu'il bouge son tronc pour corriger l'orientation de la main prothétique, le mouvement est reconstruit grâce aux données captées par des centrales inertielles et le poignet de la prothèse se met à tourner afin de réduire la compensation de tronc initiée par le sujet. Par rapport aux prothèses myoélectriques classiques (contrôlées volontairement à l'aide de contractions musculaires), ce contrôle ne demande pas d'apprentissage, ni de concentration particulière car les mouvements de compensation apparaissent naturellement. Il n'est pas fatiguant et permet potentiellement de piloter automatiquement plusieurs articulations en même temps.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2020
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.