Programme(s)
Année de production
2020

© Cyril FRÉSILLON / ISIR / CNRS Images
20200021_0008
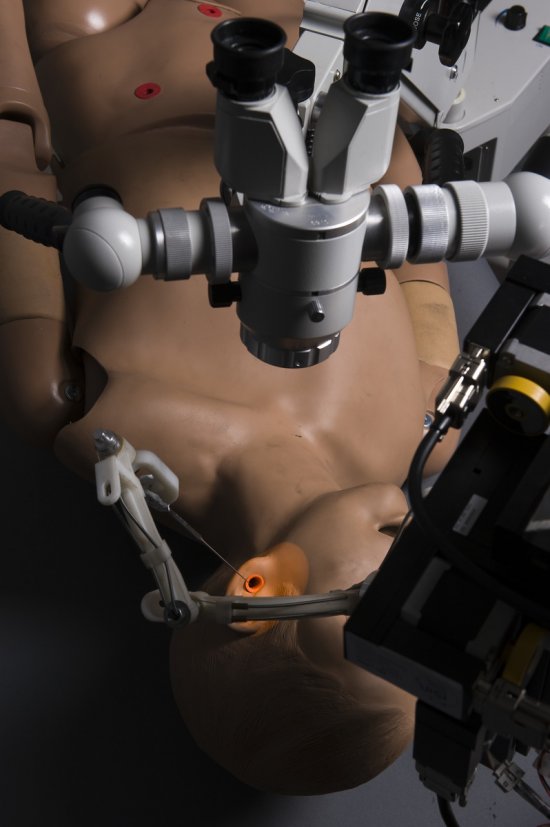
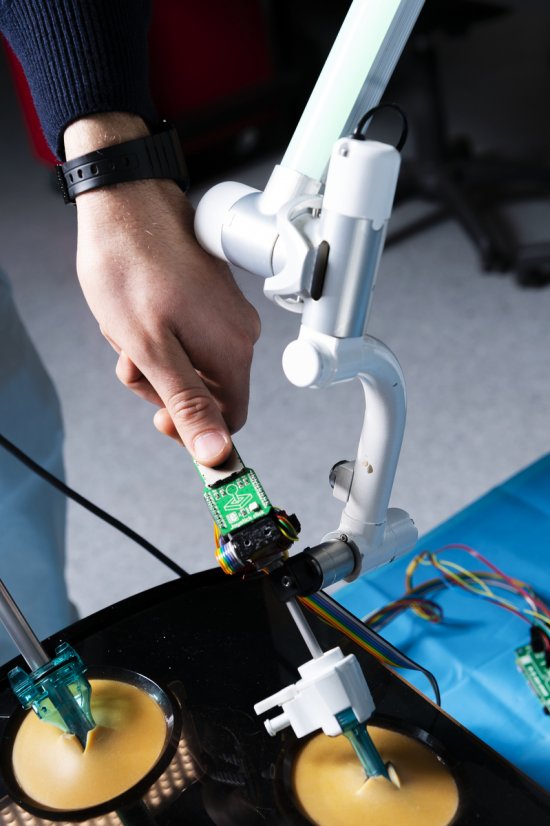
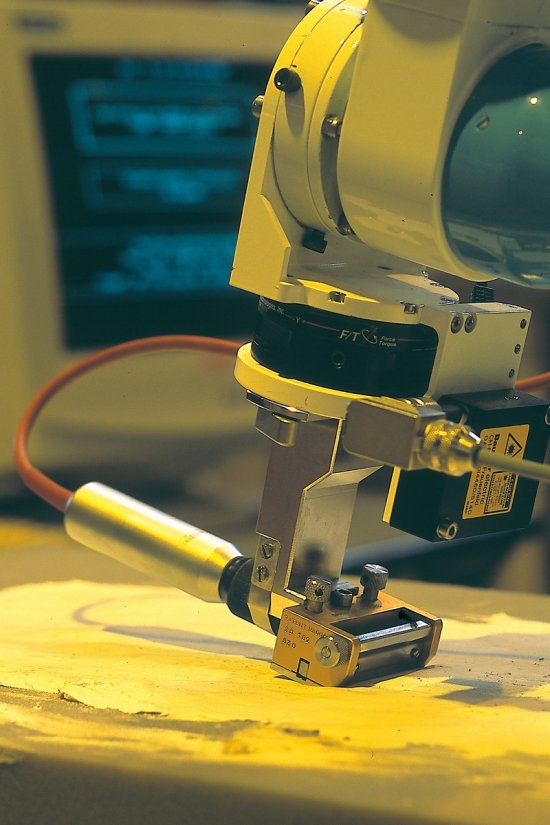
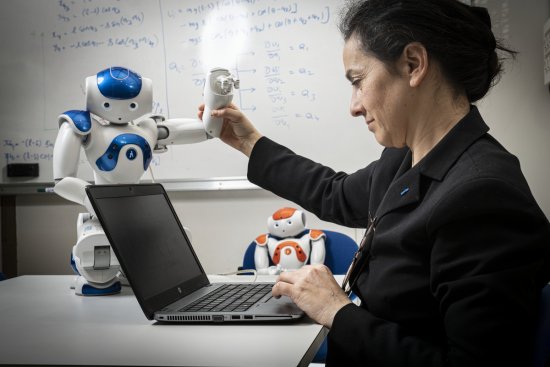
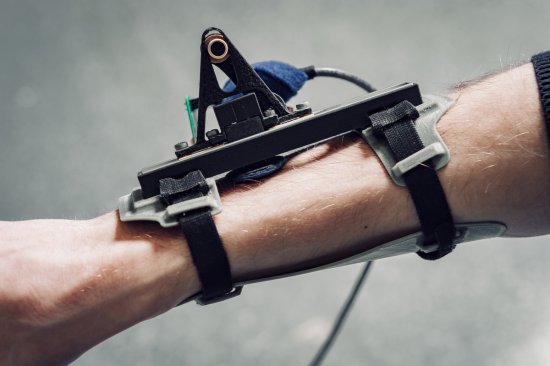
Validation expérimentale d’une loi de commande dite CCC (Compensation Cancellation Control) pour le pilotage d'une prothèse robotique de poignet avec une personne non amputée équipée à l'aide d'une orthèse, réalisant une épreuve du Cybathlon. Cette compétition destinée aux athlètes handicapés autorise l’utilisation de technologies d’assistance bionique. La prothèse n'est ici pas directement pilotée par le sujet mais cherche de façon autonome à annuler les mouvements de compensation du sujet lorsque celui-ci cherche à rectifier la mauvaise position ou la mauvaise orientation de la prothèse. Ainsi, lorsqu'il bouge son tronc pour corriger l'orientation de la main prothétique, le mouvement est reconstruit grâce aux données captées par des centrales inertielles et le poignet de la prothèse se met à tourner afin de réduire la compensation de tronc initiée par le sujet. Par rapport aux prothèses myoélectriques classiques (contrôlées volontairement à l'aide de contractions musculaires), ce contrôle ne demande pas d'apprentissage, ni de concentration particulière car les mouvements de compensation apparaissent naturellement. Il n'est pas fatiguant et permet potentiellement de piloter automatiquement plusieurs articulations en même temps.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2020
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.