
Reportage Photo
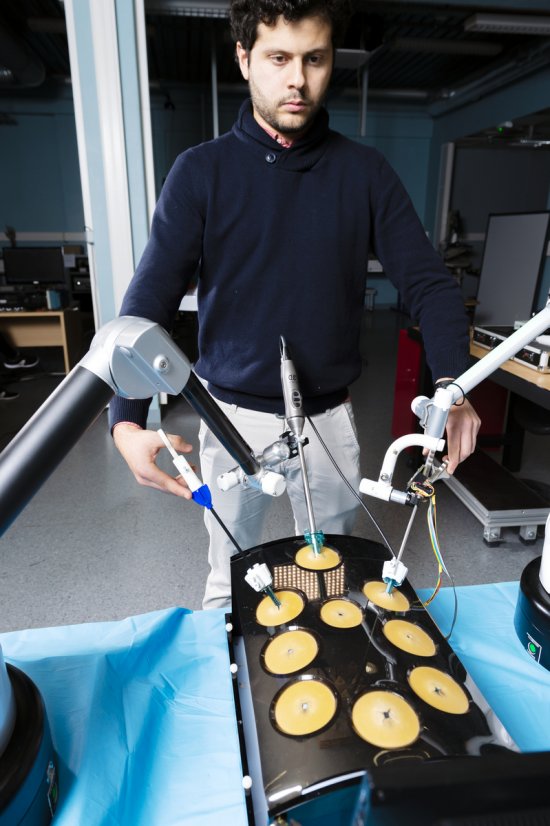
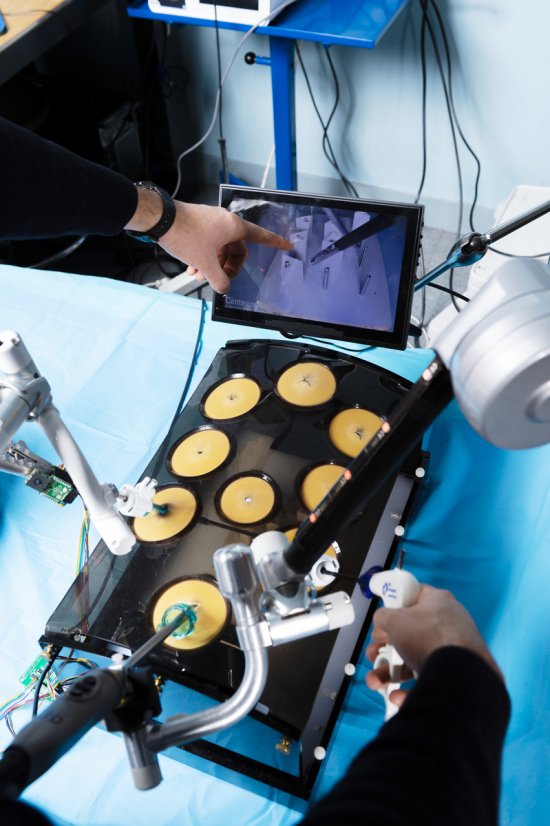
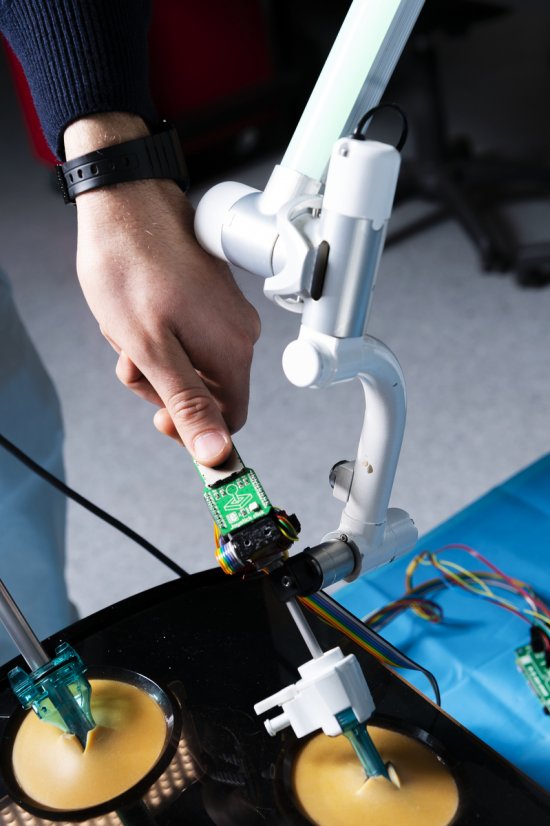
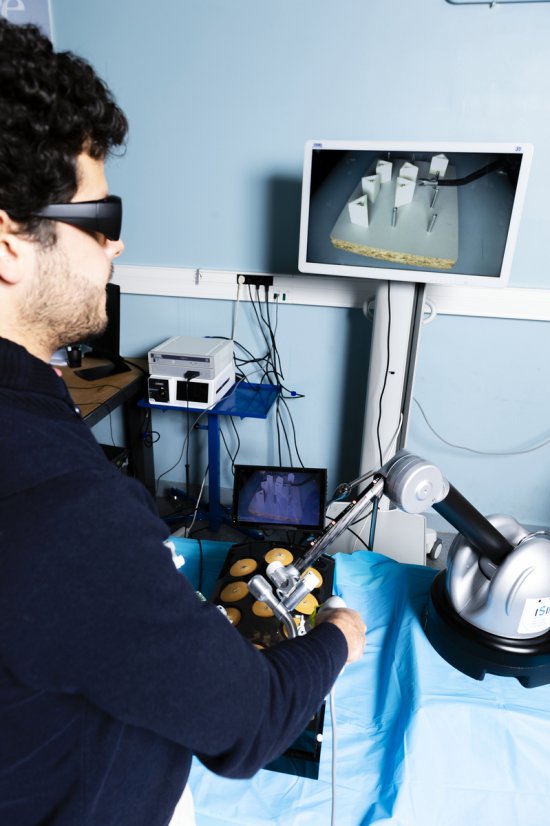
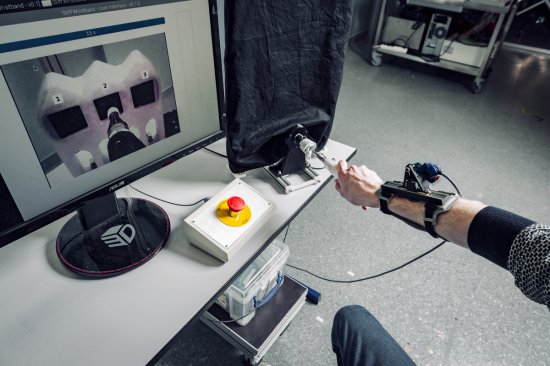
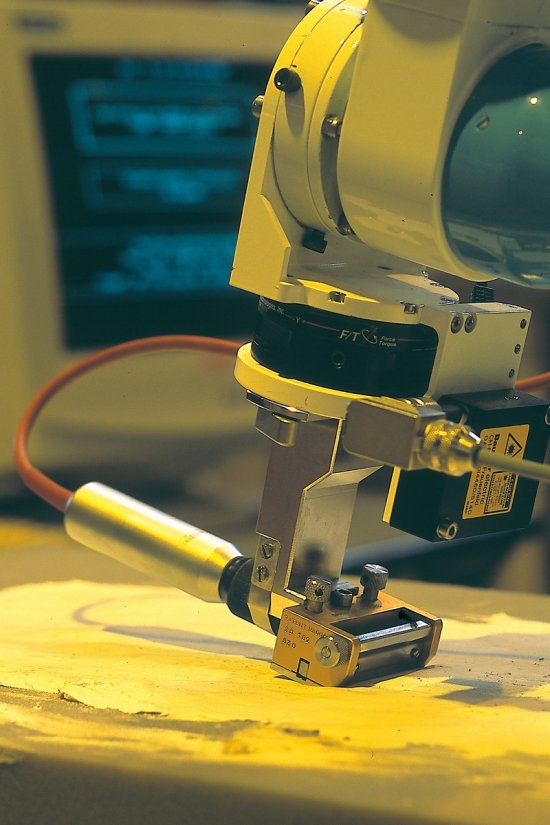
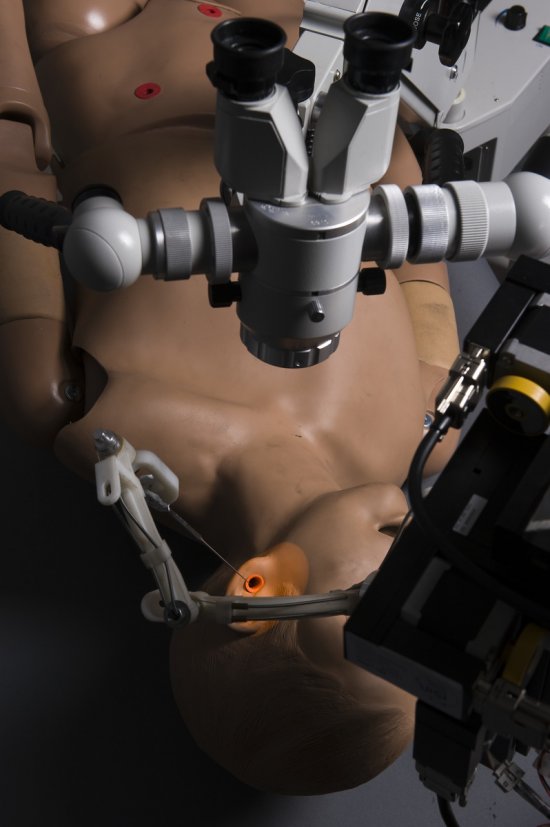
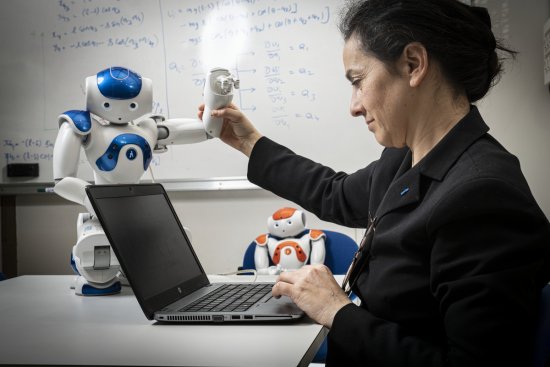
La robotique médicale à l'ISIR
Cette première partie d'un reportage consacré aux recherches de l'Institut des Systèmes Intelligents et de Robotique (ISIR) traite de la robotique médicale.
























CNRS Images,
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.