Programme(s)
Année de production
2020

© Cyril FRÉSILLON / ISIR / CNRS Images
20200021_0012
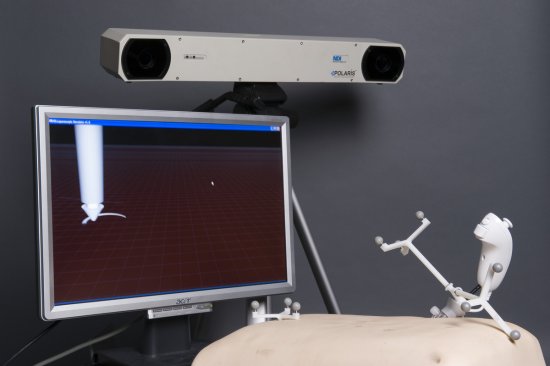
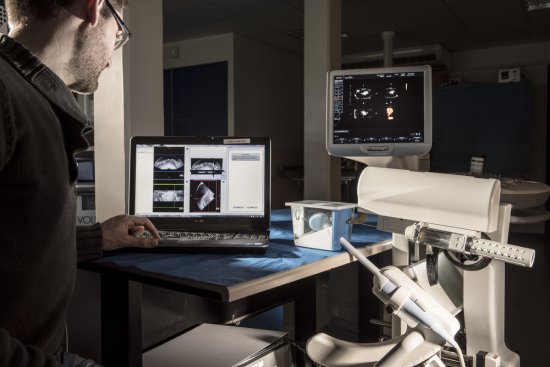
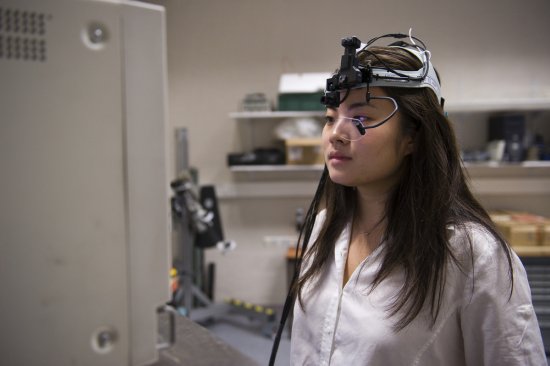
Test de manipulation d’un système robotisé d’assistance à la chirurgie du cholestéatome, une tumeur de l’oreille moyenne, sur un fantôme anatomique. Un mini-robot de type endoscope actif (en noir) possède deux mobilités adaptées à ce type de chirurgie. Il est situé à l’extrémité d’un bras porteur (non visible) et l’opérateur le manipule via un joystick de téléopération. C’est l’une des deux manières d’utiliser le système. Par rapport à une opération réalisée à la main, ce système pour la chirurgie ORL améliore la précision et la stabilité du geste, annulant les risques de tremblement et de fatigue de la main. Il améliore également l’accessibilité, puisque les mobilités intracorporelles contournent les obstacles (nerf facial, osselets, etc.) pour venir pointer sur des zones pathologiques de très petite surface.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2020
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.