Voir la série
Voir la série
Lire la transcription
Uniquement disponible pour exploitation non commerciale
© CNRS - 2023
Numéro de notice
7672
Au corps à core avec les robots - Va Savoir #03
Titre Série
Va savoirQu'on leur prête le dessein de nous anéantir, de nous remplacer dans les usines ou de devenir nos esclaves (voire nos amis !), les robots alimentent nos fantasmes depuis des siècles… Surtout lorsqu'ils nous ressemblent. Sauf qu'en vérité, on n'en croise pas beaucoup ailleurs que dans la fiction. Alors on s'est demandé dans cet épisode de #VaSavoir : au fond, à quoi bon chercher à créer des robots humanoïdes ? Et scientifiquement, qu'est-ce qui se cache vraiment derrière cette volonté en apparence prométhéenne ? Pour mieux comprendre, on est allés voir les scientifiques du LAAS-CNRS, à Toulouse, qui comptent parmi les meilleurs spécialistes des robots en France.
Durée
00:10:32
Année de production
Définition
HD
Couleur
Couleur
Son
Sonore
Version(s)
Français
Support Original
Apple ProRes 422
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
Transcription
Maxime Labat :
En fait, ça fait des siècles que les robots existent ; mais si sous une forme ou sous une autre, dans notre imaginaire collectif. C'est bien sûr le mythe de l'esclave parfait, sans libre arbitre, qui est complètement corvéable à merci et qui pourtant trouve le moyen de se rebeller contre ses créateurs. Mais d'autres imaginaires sont disponibles, comme par exemple au Japon, où les robots sont plutôt bienveillants, très certainement parce qu'on trouvait là-bas des mythes très anciens dans lesquels les objets ou des entités naturelles avaient des âmes. Aujourd'hui, ces différents imaginaires se mélangent, on a l'impression que les robots vont nous remplacer dans les chaînes d'usines, que certains vont aller faire la guerre ou alors que d'autres vont prendre soin des personnes dépendantes. Sauf que des robots, on n'en voit pas beaucoup et encore moins des robots qui nous ressemblent. Alors j'ai voulu savoir où on en était réellement dans les laboratoires de recherche, au-delà des prophéties et des fantasmes de science-fiction.
J'ai donc été accueilli à Toulouse, au Laboratoire d'architecture et d'analyse des systèmes pour rencontrer l'équipe Gepetto, qui travaille sur les mouvements des systèmes anthropomorphes, sur les robots humanoïdes quoi.
Nicolas Mansart :
Je suis Nicolas Mansart, je suis chercheur dans l'équipe Gepetto du LAAS CNRS et je suis un être humain, jusqu'à preuve du contraire. Alors viens je vais te faire jouer un jeu qui est extrêmement difficile pour les robots.
Maxime Labat :
Non, mais un jeu d'échecs, je vais perdre, je joue pas très très bien.
Nicolas Mansart :
Non, ce n'est pas ce que tu crois. Regarde. Il manque le Roi noir, je l'ai caché dans la pièce et tu vas le chercher. Ça, c'est quelque chose qui est très difficile pour un robot.
Maxime Labat :
OK. Alors…
Nicolas Mansart :
Alors là, tu vois, tu marches, tu te déplaces, tu saisis un livre. Ça, c'est très difficile pour notre robot. De mettre le genou par terre. Ça, c'est fantastique. Si je savais faire ça, j'aurai le prix Nobel. Tu appuies, tu te mets sur un seul pied, ça c'est fantastique. C'est vraiment un geste de toute beauté. Et si tu reconnais le pion noir, même s'il est dans l'obscurité, c'est voilà, ça c'est très difficile pour un robot. Je peux vraiment te considérer comme un robot d'extrême valeur.
Maxime Labat :
J'l'ai eu mon pote. Ah c'est marrant du coup, votre équipe de recherche, elle s'appelle Gepetto. C'est vraiment ça le projet, c'est d'avoir…
Nicolas Mansart :
Le marionnettiste.
Maxime Labat :
Le marionnettiste. Mais on coupe les fils. Et puis la marionnette se débrouille un peu toute seule ?
Nicolas Mansart :
Ouais c'est ça… on veut mettre le marionnettiste dans la tête du robot. Avoir les algorithmes de Geppetto qui font bouger Pinocchio.
Maxime Labat :
En fait, c'est des actions complètement banales que je fais tous les jours, qui sont prodigieuses et qui sont, faut se valoriser un peu dans…
Nicolas Mansart :
Les décisions de mouvements qu'on prend, elles sont, elles sont magiques. Il y a énormément de décisions, de toutes petites décisions, mais cumulées ensemble, ça fait des milliers de décisions qui sont prises en même temps, avec des temps de réaction qui sont très inférieurs à la seconde. Et le robot de tenir debout, faire un pas, attraper une pièce d'échecs, prendre aussi des décisions au niveau de la perception, décider de différencier un objet d'un autre objet… Tout ça, c'est des décisions qui sont vraiment très compliquées à prendre. Et ces décisions-là, on les associe pas du tout, le public les associe pas du tout, à l'intelligence : de dire je veux faire de l'intelligence artificielle, je veux faire que mon robot soit capable de monter un escalier. C'est pas une tâche intelligente, une tâche intelligente, c'est jouer aux échecs. Ça, c'est intelligent. Mais d'un point de vue du nombre de décisions à prendre, jouer aux échecs, c'est très réduit. Et monter un escalier, ça implique des tonnes de décisions. Sans parler de tout le contexte qu'il y a autour.
Maxime Labat :
Se lever de son lit, trouver ses chaussons, aller péniblement en s'appuyant sur les murs, se faire un café… C'est…
Nicolas Mansart :
Une tâche d'une redoutable. Redoutable d'intelligence.
Maxime Labat :
Redoutable d'intelligence.
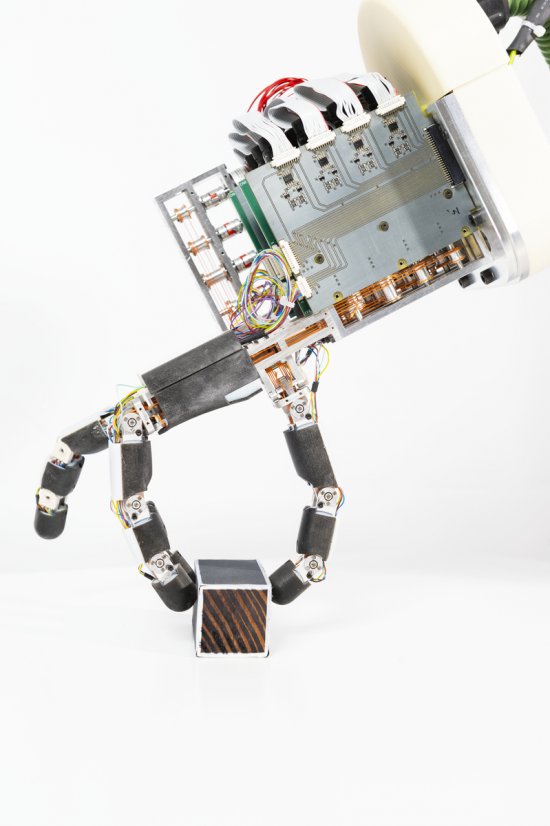
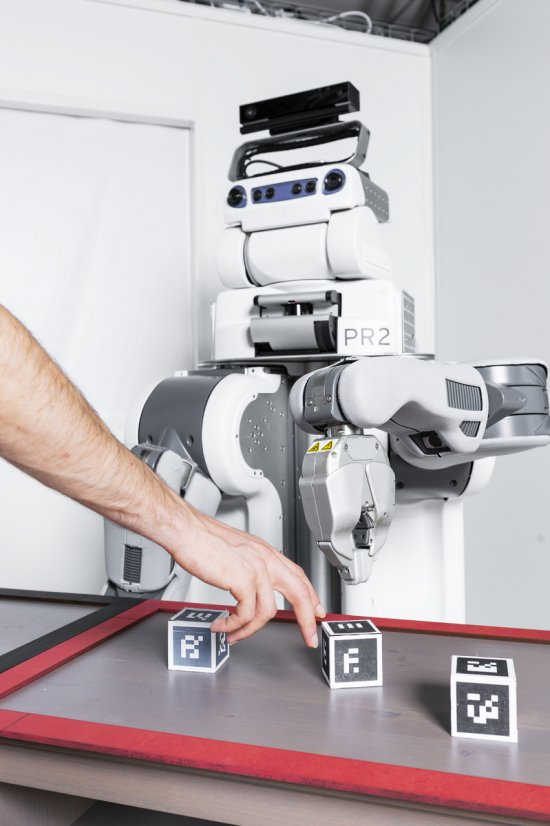
Ça, c'est pyrene : 1,75 m pour 100 kilos sur la balance, 32 articulations mises en mouvement par des moteurs électriques. Niveau perception du monde, il a deux caméras pour une vision stéréoscopique, un lidar et il est capable de sentir les retours de force qui s'exercent sur ces moteurs et sur ces semelles. Les pyrènes existent aussi sous forme de modèle : c'est sur cette version informatique que l'on calcule les mouvements du robot. Le but des roboticiens et des informaticiens est de lier avec succès ces deux entités, mécanique et informatique, pour créer un robot le plus autonome et le moins dangereux possible, pour lui-même et pour les autres. Ça passe notamment par un travail d'étalonnage que vous voyez là pour réduire l'écart entre les mouvements planifiés et les mouvements réalisés.
Pierre Fernbach :
En plus de tout ça, un des points très intéressants de ce robot, c'est qu'il va avoir des capteurs de couple dans toutes ses articulations, à part au niveau de la tête et des poignets, et ça, ça va permettre de mesurer les forces extérieures qui sont impliquées au niveau du robot. Donc ça va être un contrôle beaucoup plus souple qui est beaucoup moins dangereux lorsqu'il est opéré proche du (…) Parce que si on va rentrer dedans, il ne va pas rester rigide. Mais il va absorber l'impact.
Maxime Labat :
Et il y a un autre champ d'étude qui est vraiment le corps du robot. Vous travaillez là-dessus aussi sur la partie matérielle. Quel quel moteur, quel matériau, quel poids par rapport à la puissance ?
Nicolas Mansart :
Concevoir le robot, c'est vraiment une des questions, et pour les robots quadrupèdes, c'est une question qui est bien bien aboutie. On commence à vraiment savoir comment concevoir un corps de quadrupèdes ; pour les bipèdes, c'est vraiment une question qui est d'actualité.
Maxime Labat :
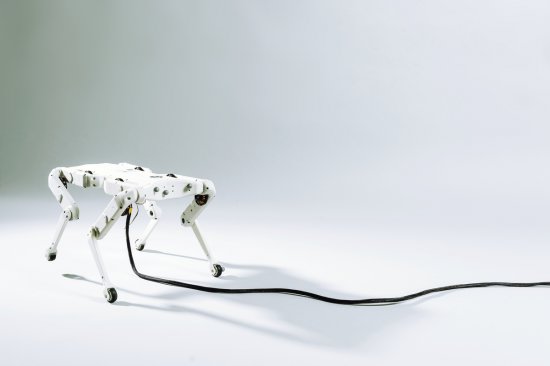
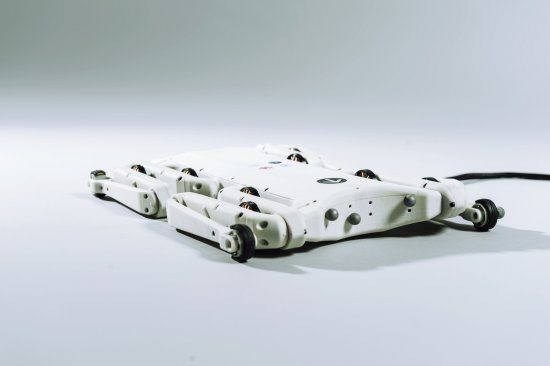
Donc toi Pierre-Alexandre, tu travailles sur un robot quadrupède par rapport à Pyrène, il y a des choses que vous arrivez à faire sur ce genre de robot que vous n'arrivez pas à faire avec Pyrène ?
Pierre-Alexandre Léziart :
Les deux robots vont permettre de mettre en oeuvre les mêmes techniques à peu près de contrôle. Et c'est justement un des intérêts d'avoir une plateforme relativement petite et facile à mettre en oeuvre comparé à un robot humanoïde beaucoup plus lourd et donc qui va nous permettre de tester de nouveaux algorithmes de contrôle, un peu les améliorer éventuellement s'il y a quelque chose qui casse, on peut facilement le réparer, comme le robot est imprimé en impression 3D, et une fois que tout ça sera bien mis au point, qu'on voit qu'il n'y a plus trop d'erreur de contrôle, on pourra éventuellement plus tard le mettre sur un robot humanoïde.
Maxime Labat :
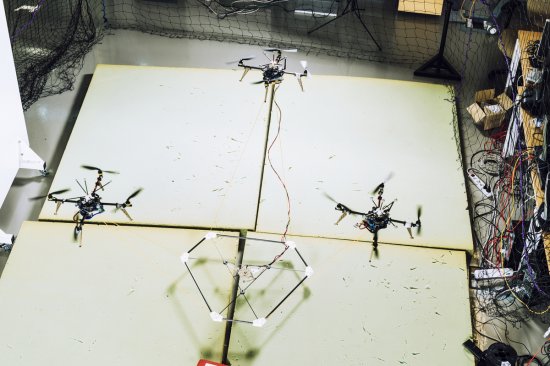
Vous êtes en train d'observer la danse nuptiale du robot quadrupède. D'ici peu, il tentera un accouplement. J'ai vu que tu avais une manette de PlayStation, tu fais vraiment bouger ça avec ça ?
Pierre-Alexandre Léziart :
Donc c'est ça. En fait, on envoie une consigne de direction au robot. Par exemple, si je lui ai dit, si je mets le joystick vers l'avant, il va aller tout droit et lui va prendre en compte cette direction, prédire ce qui va se passer sur une demi seconde dans le futur, au niveau du positionnement de ses pieds, des forces qu'il va appliquer sur le sol.
Maxime Labat :
Donc il a un modèle de lui-même et il applique ce qu'il va faire et il voit le résultat et il le fait.
Pierre-Alexandre Léziart :
Ouais c'est ça, tout à fait on lui a donné les masses de chacun de ses éléments, les masses des jambes, les masses de la base du robot. Donc cette prédiction-là, avec une demi seconde dans le futur, il le fait 500 fois par seconde et après au niveau du vraiment du calcul bas niveau des moteurs, il le fait 10 000 fois par seconde.
Maxime Labat :
OK. J'ai l'impression d'être dans le futur là que bon…
Pierre-Alexandre Léziart :
Donc là il y a une première phase de calibration au début pour qu'il justement s'initialise un petit peu Et là, on va le lancer hop ! Et voilà, il est à partir de ce moment-là, tu peux le poser par terre, il va rester stabilisé. Si tu l'ajoute un peu, il réagit, on voit, qu'il réagit un peu. Quand je le bouge pour essayer de se stabiliser.
Maxime Labat :
Il a peur-là, on a vraiment l'impression que c'est vivant, c'est chelou.
Pierre-Alexandre Léziart :
Et après voilà, on peut si tu veux le contrôler…
Maxime Labat :
Oh mon dieu ! Faire un robot humanoïde, c'est un petit peu comme essayer de calculer les décimales de Pi. Primo, vous n'y arriverais pas. Et secondo, c'est pas vraiment le but. Le but, c'est d'avoir un cas pratique une espèce de défi autour duquel les chercheurs peuvent se retrouver pour parler entre des disciplines qui sans ça n'auraient pas de raison d'échanger.
Nicolas Mansart :
C'est vraiment par nature la robotique, une science qui est connexe et la robotique a aussi cette propriété de connecter la science dure des maths, des maths qui sont vraiment sur papier et de la technologie. On est vraiment aussi à l'interface entre les deux.
Maxime Labat :
Et toutes les connaissances que vous produisez, elles circulent au sein d'une communauté mondiale librement. Il n'y a pas de brevet ici, il n'y a pas de, tout est public open source et partagé ?
Nicolas Mansart :
Le CNRS a vraiment pour objectif de produire de la connaissance et de la mettre à disposition au sens large. On publie sous licence ouverte, on sort nos logiciels sous licence ouverte. Nous menons nos concepts mécaniques sous licence ouverte, c'est vraiment un souhait dans l'équipe qu'on a de mettre à disposition de la communauté au sens large.
Maxime Labat :
Alors, quelle sera la place des robots humanoïdes dans le futur ? Va savoir. Mais je me dis que ce serait quand même fou qu'ils réussissent à changer nos vies sans jamais réellement exister, sans qu'on croise de robots humanoïdes dans la rue. Jamais. Donc le moment où ils vont se rebeller contre nous pour demander des droits, l'apocalypse des robots tueurs, c'est pas pour tout de suite.
Nicolas Mansart :
Non alors la blague dans le domaine, c'est de dire pour éviter l'apocalypse des robots tueurs, pensez à fermer les portes parce qu'on est au point ou pour l'instant des robots, ils n'arrivent pas à marcher jusqu'à la porte, à l'ouvrir une porte. Déjà une porte, ça c'est déjà dur... Alors on a une variété de portes, une porte qui glisse, une porte qui s'ouvre en poussant, en se tirant avec une poignée ronde, (…) d'ouvrir avec la clé, mettre la clé dans la serveuse. Donc non, on est vraiment loin d'avoir un robot qui fonctionne pour ça. C'est quelque chose qui est trop difficile.
Maxime Labat :
Mais peut être qu'ils auront changé notre manière d'opérer des cancers, de faire voler automatiquement des avions ou de faire marcher des rovers sur Mars. Autrement dit, les recherches menées sur les robots humanoïdes auront des impacts sur les mathématiques, l'informatique ou même la médecine. Ecoute, je crois que je t'ai mal jugé. Sans rancune.