Année de production
2013

© Cyril FRESILLON / PPRIME / CNRS Images
20130001_0570
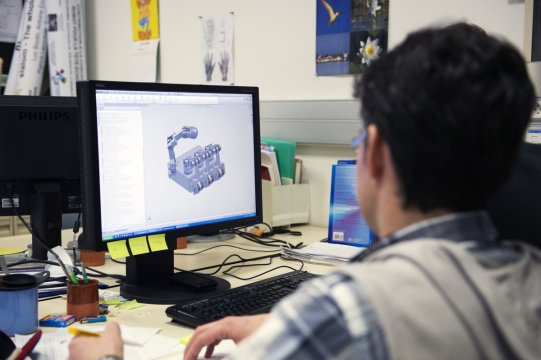
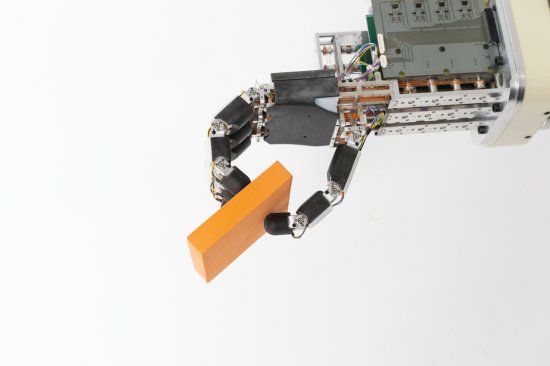
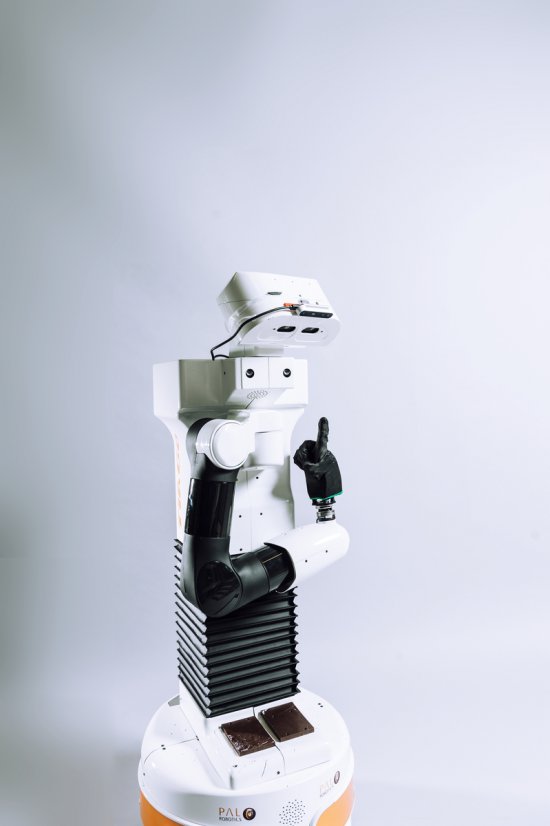
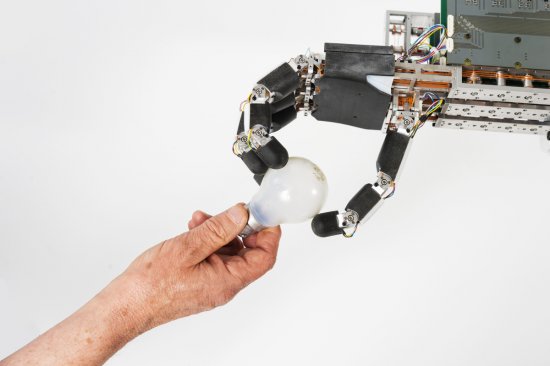
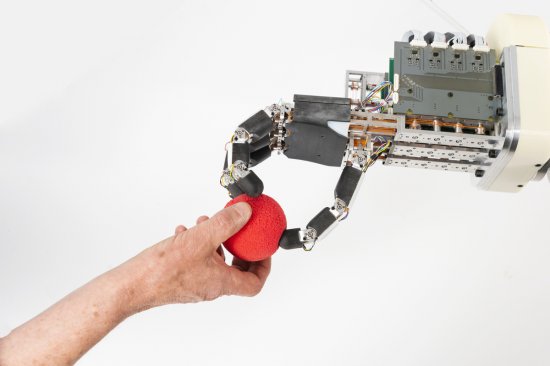
Opération de maintenance sur une main robotique à 4 doigts et 16 actionneurs aux dimensions anthropomorphes. Cette main robotique est utilisée pour des recherches en préhension et manipulation dextre, ainsi qu'en cobotique. Elle vise à reproduire la dextérité de la main humaine. Des stratégies de commande, pour la reproduction de tâches de saisie et de manipulation dextre, sont proposées dans le cadre de ces recherches. Ainsi, chaque doigt de la main robotique possède une cinématique comparable à celle du doigt humain (trois mouvements de flexion et un mouvement d'abduction-adduction). Il est également capable d'évaluer les efforts d'interaction avec l'environnement.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2013
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.