Année de production
2020

© Cyril FRÉSILLON / ISIR / CNRS Images
20200028_0013
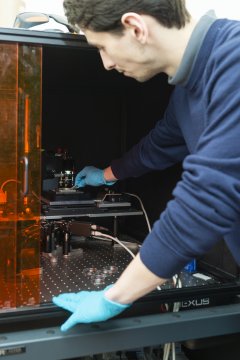
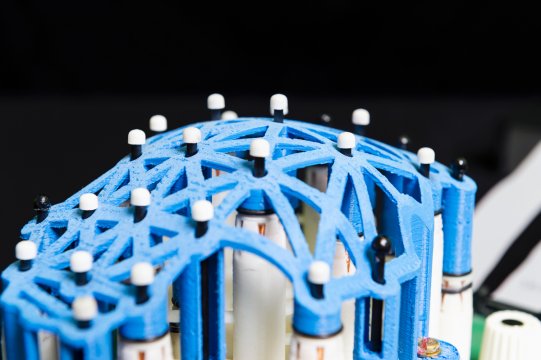
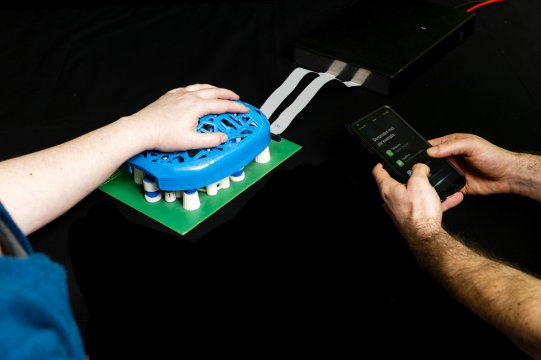
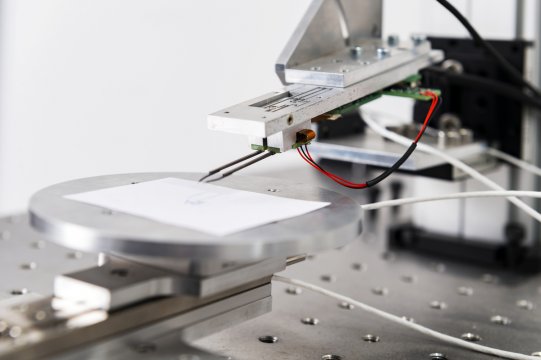
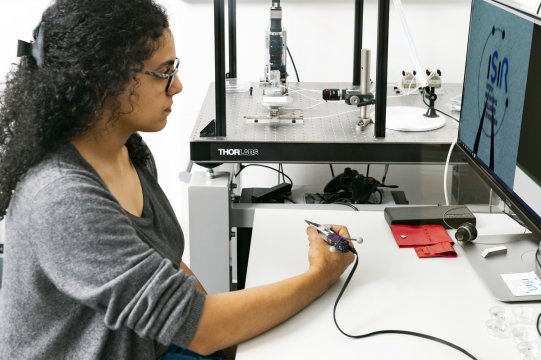
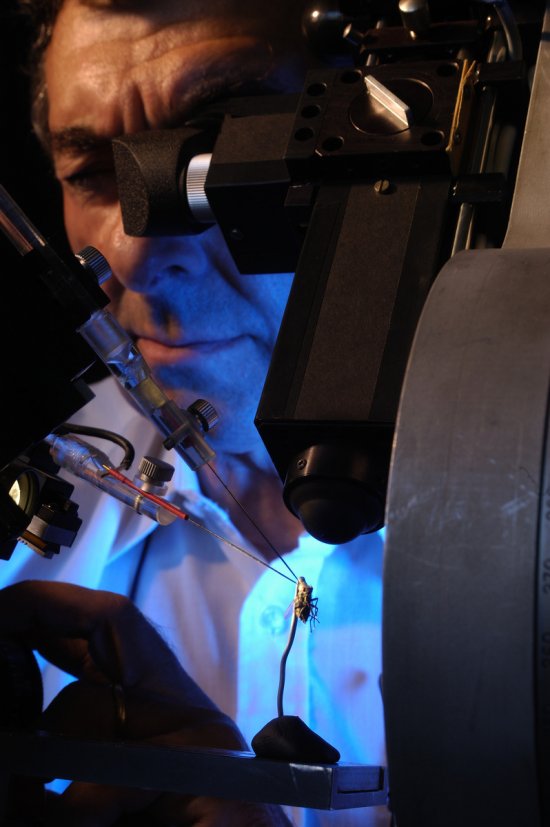
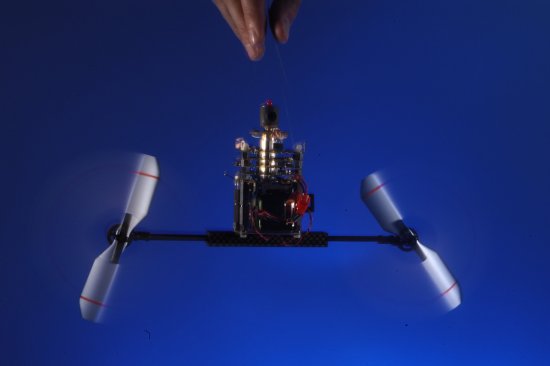
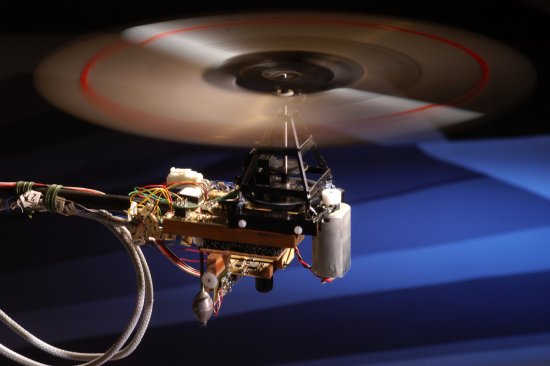
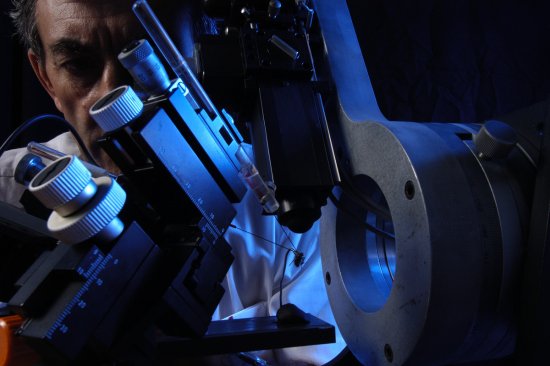
Manipulation d’une cellule à l’aide d’un microrobot sur une station de pinces optiques. Ce dispositif permet de manipuler des objets de taille micrométrique sans contact, grâce à la force résultant de la réfraction d’un faisceau laser. C’est le principe du piège optique. La télé-opération est utilisée pour des échantillons biologiques devant être confinés (cellules cancéreuses, bactéries, parasites, etc.). A l’écran, un microrobot sert d’intermédiaire : il est contrôlé via les pinces optiques pour manipuler une cellule. On évite ainsi le contact direct avec le laser infrarouge, délétère pour le matériel biologique. Le manipulateur permet également un retour de force, grâce à l’utilisation d’une caméra événementielle (de capture de mouvement). Cette interface haptique est développée par l’Institut des systèmes intelligents et de robotique (ISIR), en collaboration avec l’Institut de la vision.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2020
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.