
Reportage Photo
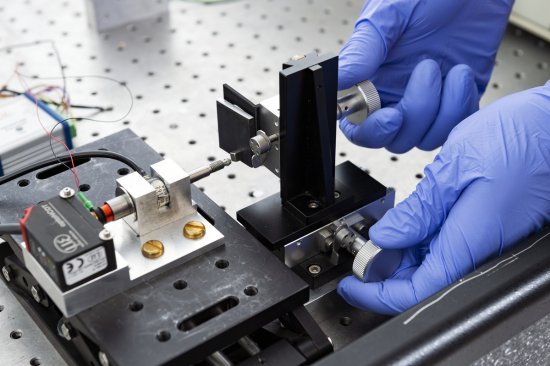
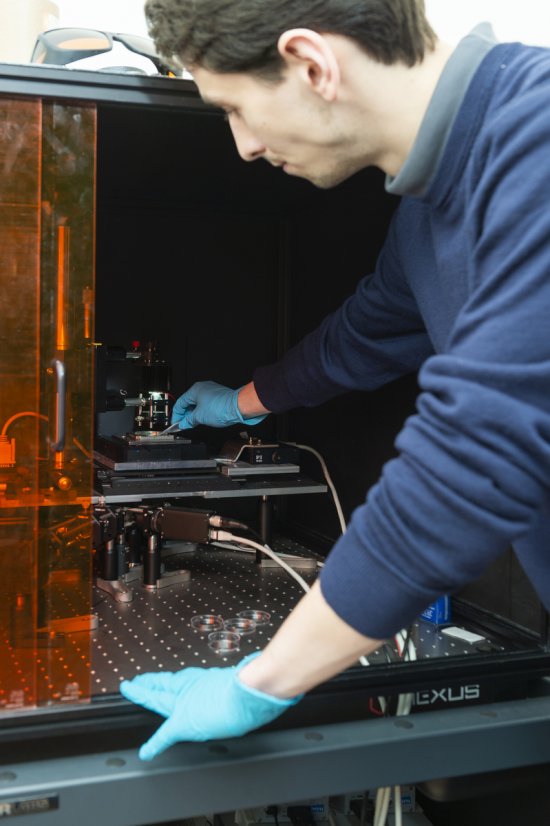
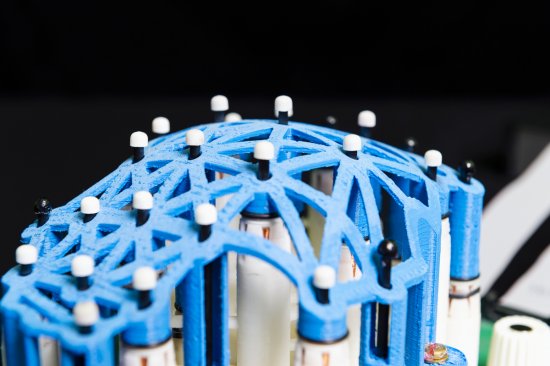
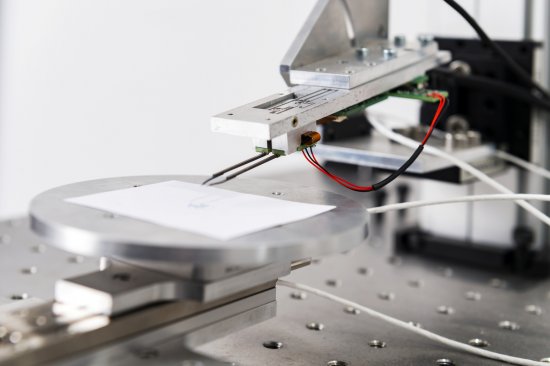
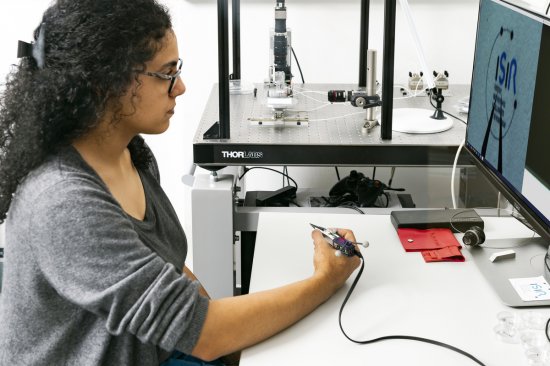
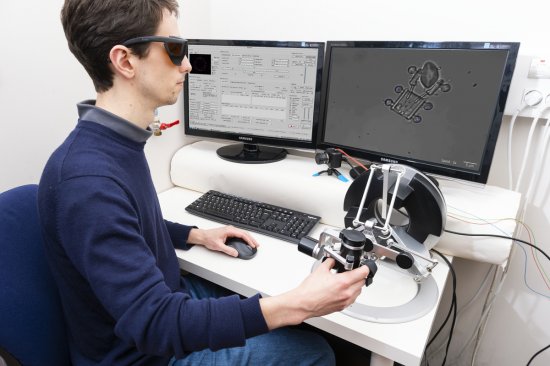
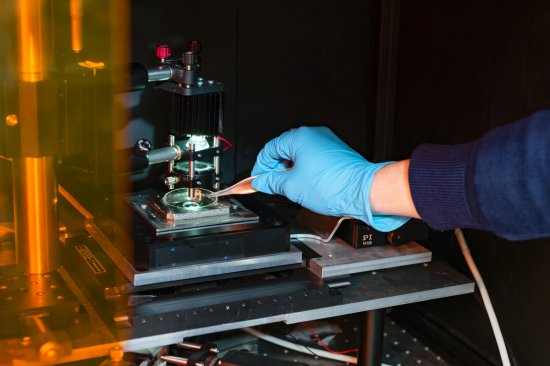
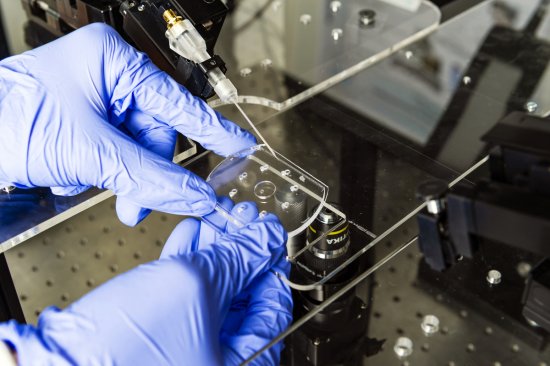
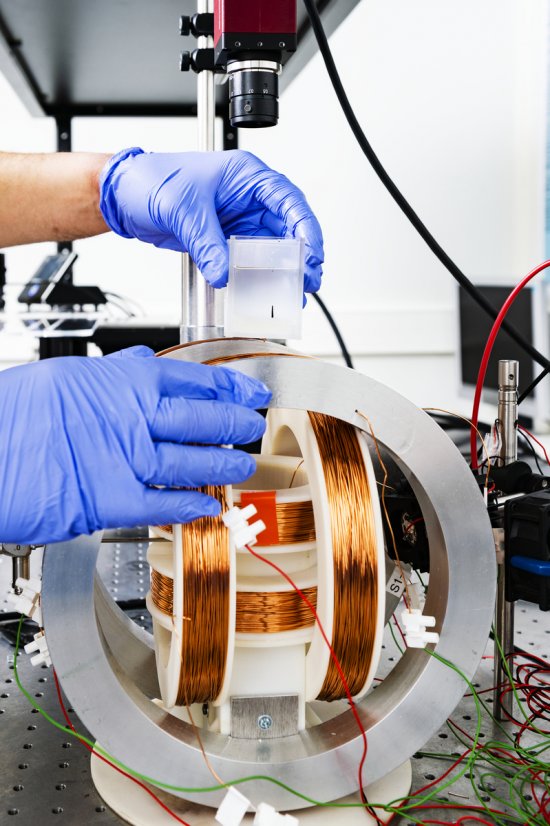
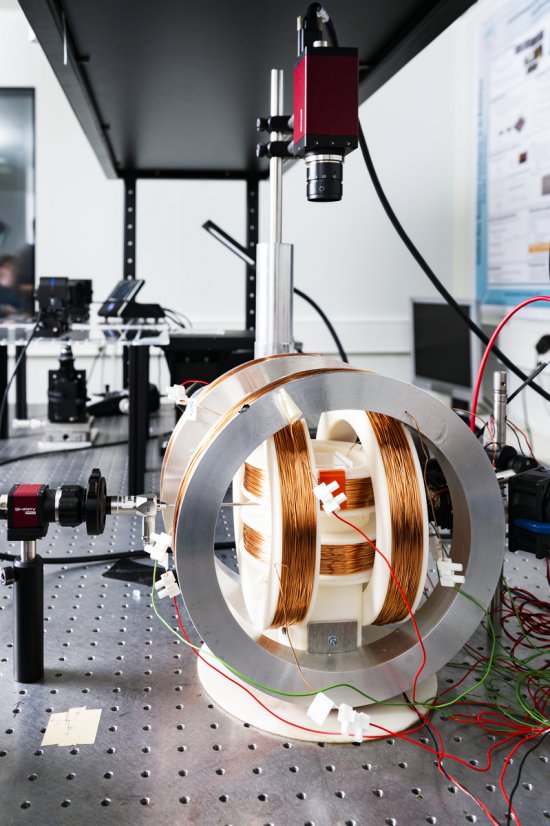
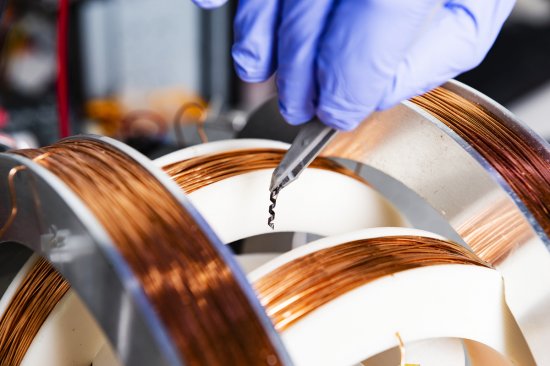
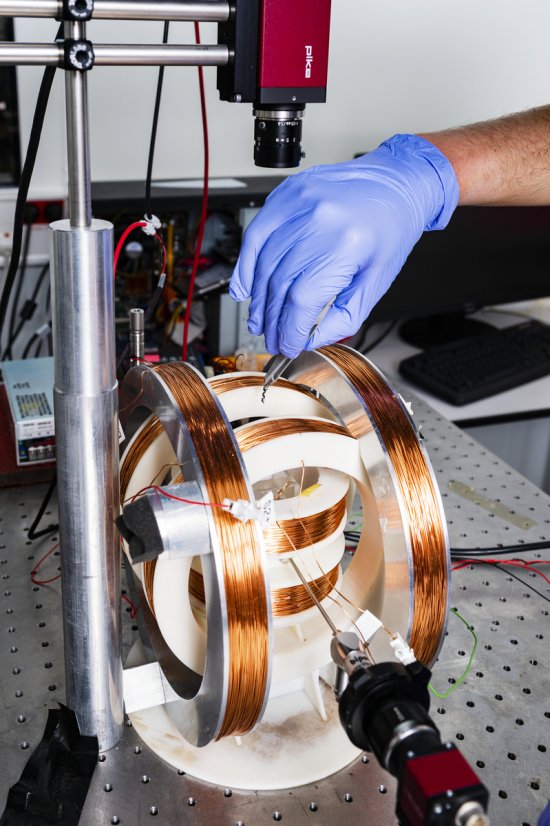
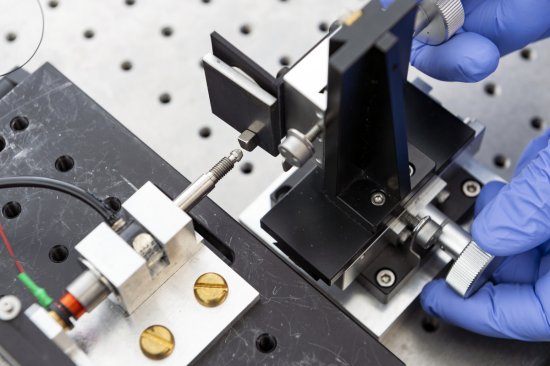
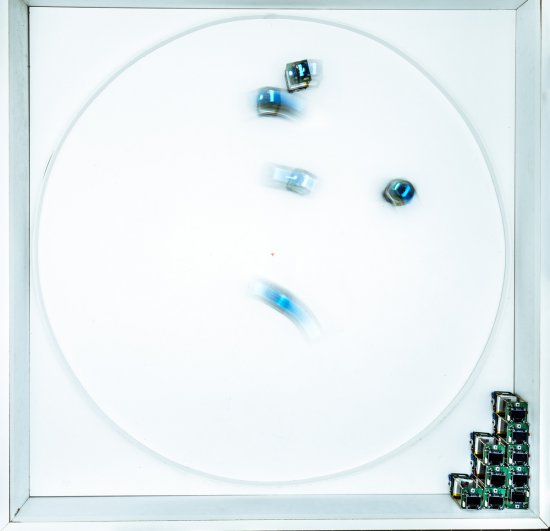
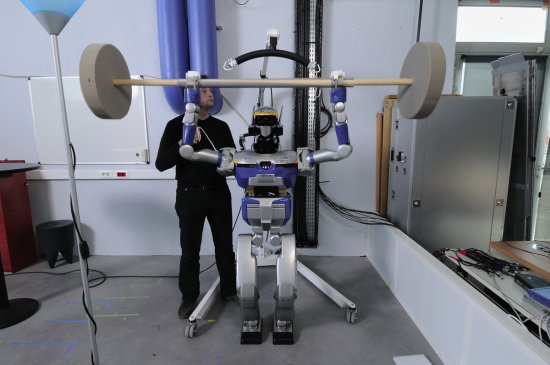
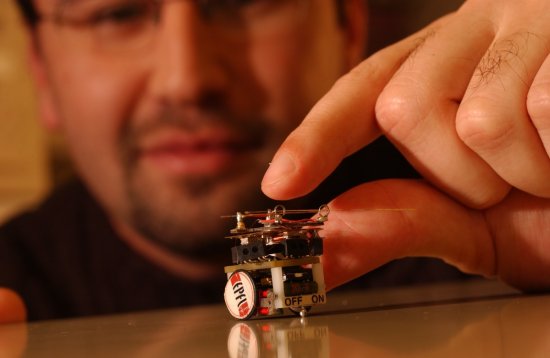
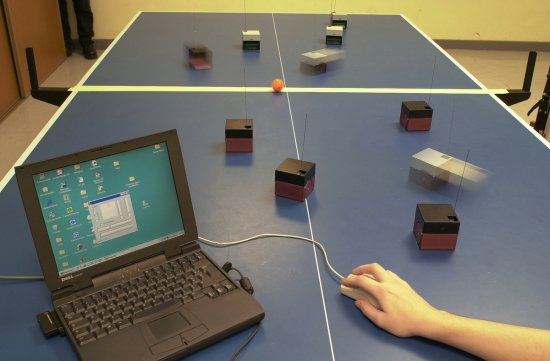
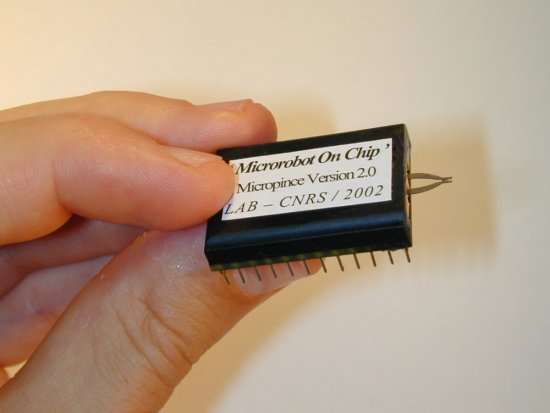
Microrobotique et systèmes haptiques à l'ISIR
Cette deuxième partie d'un reportage consacré à l'Institut des Systèmes Intelligents et de Robotique (ISIR) traite des recherches en microrobotique et sur les systèmes haptiques.



















CNRS Images,
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.