
Photo report
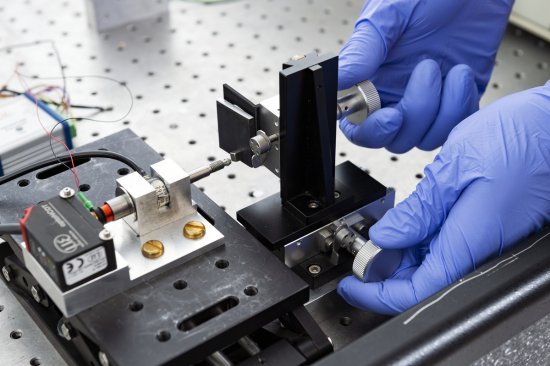
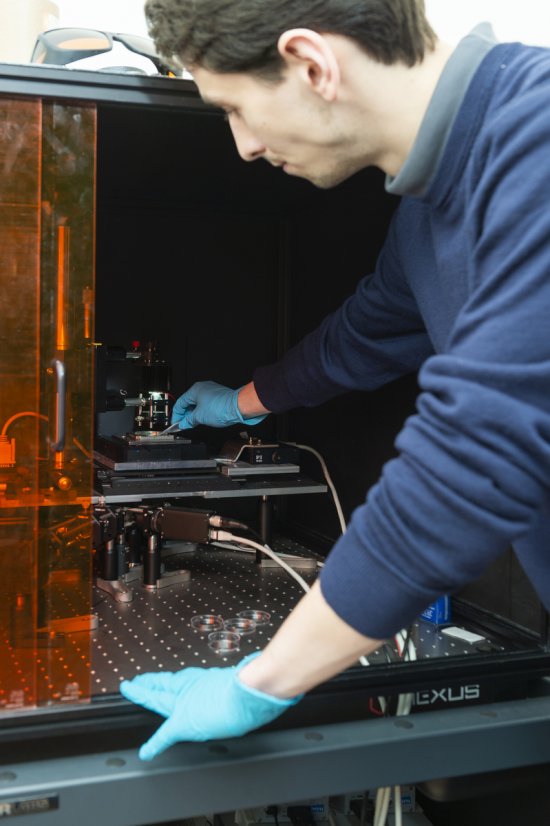
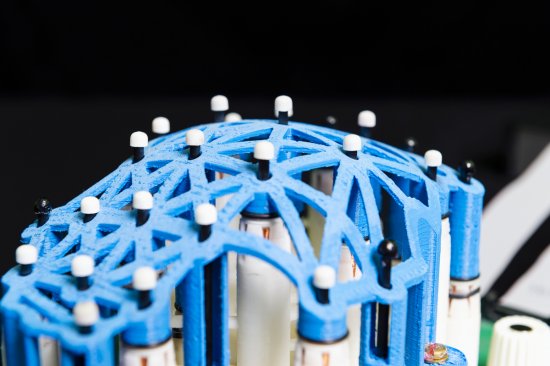
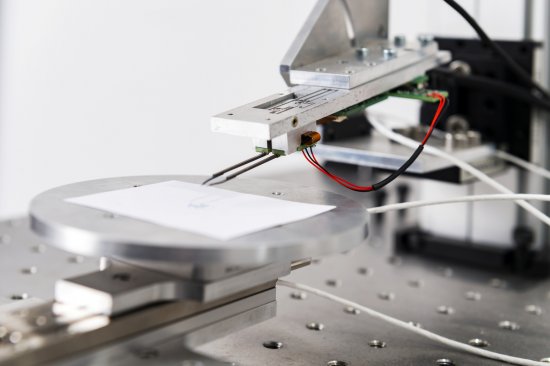
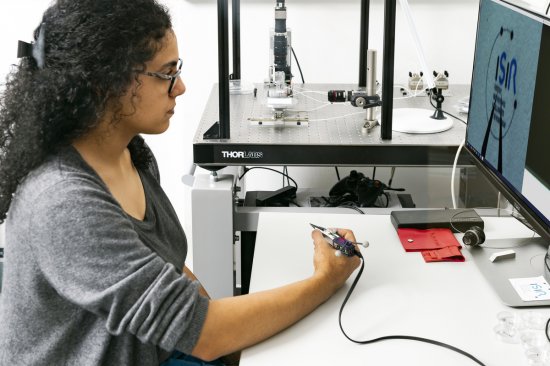
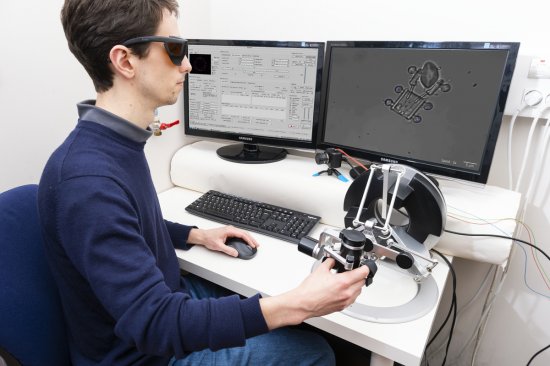
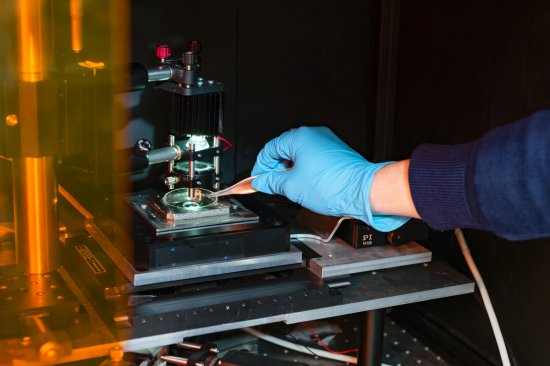
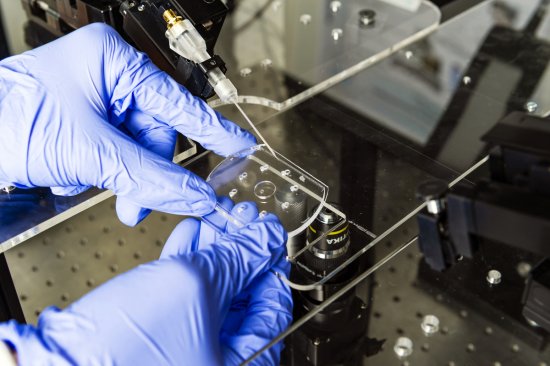
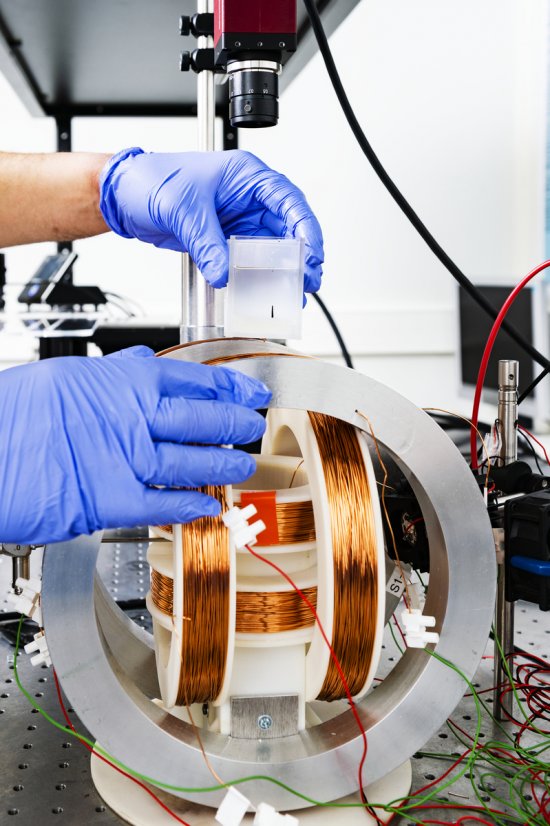
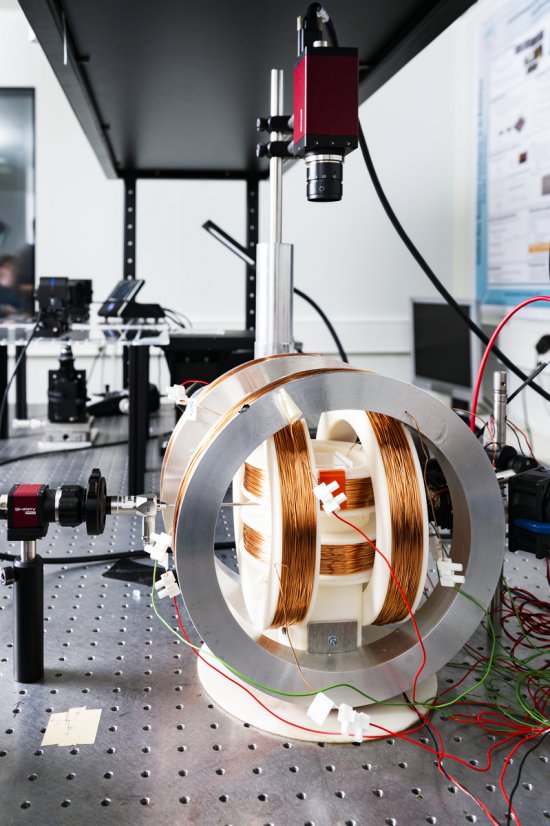
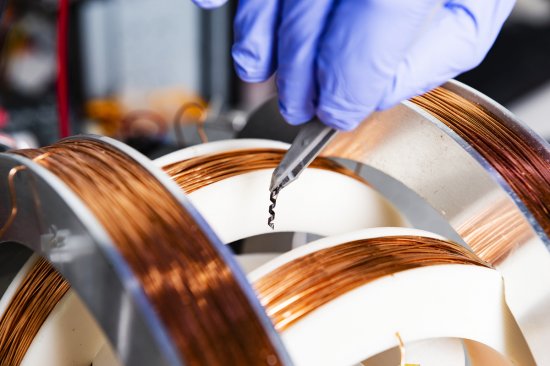
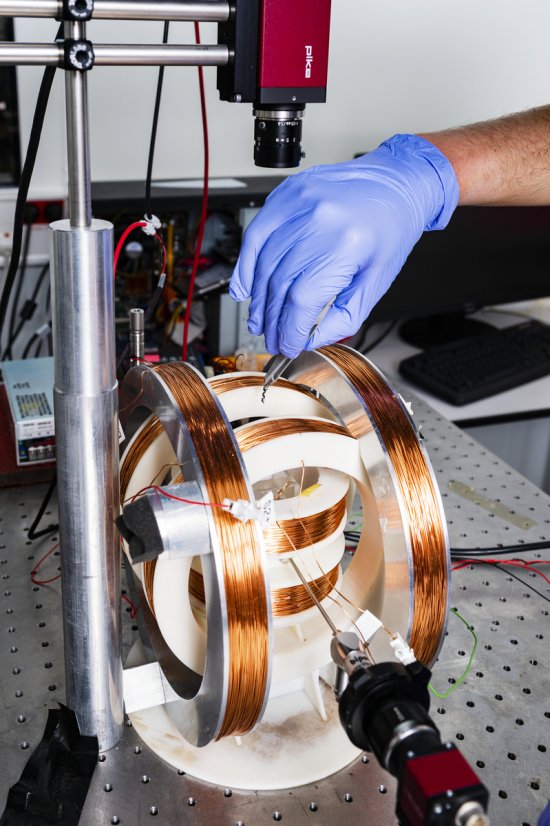
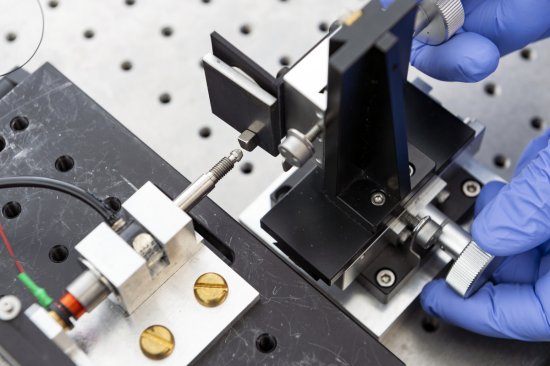
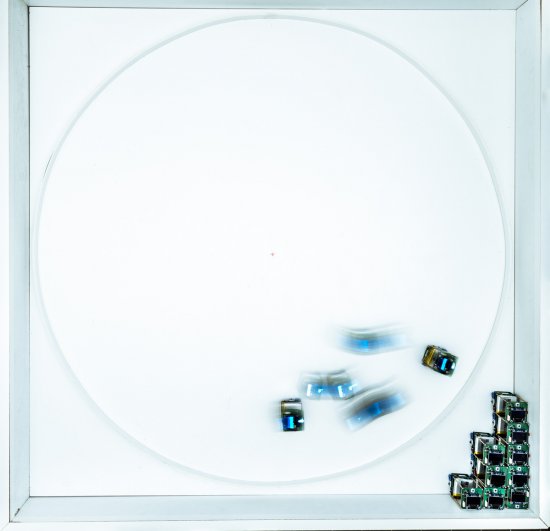
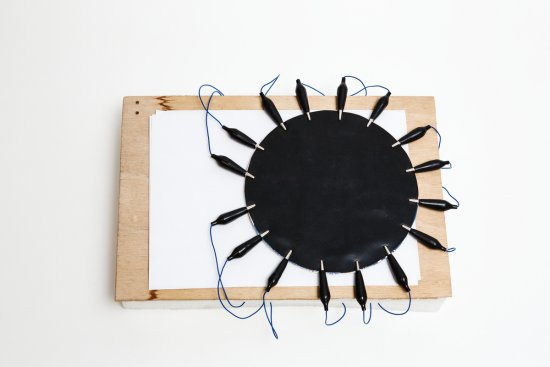
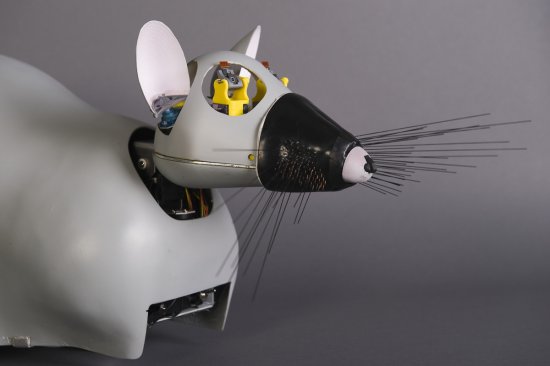
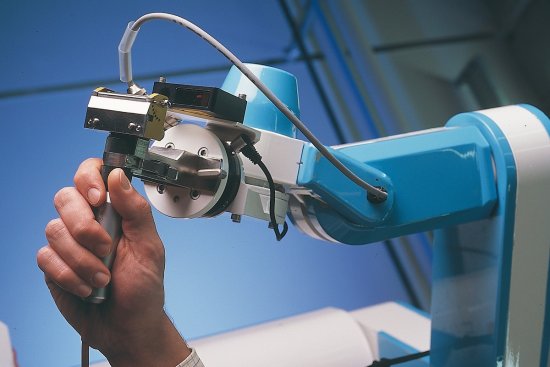
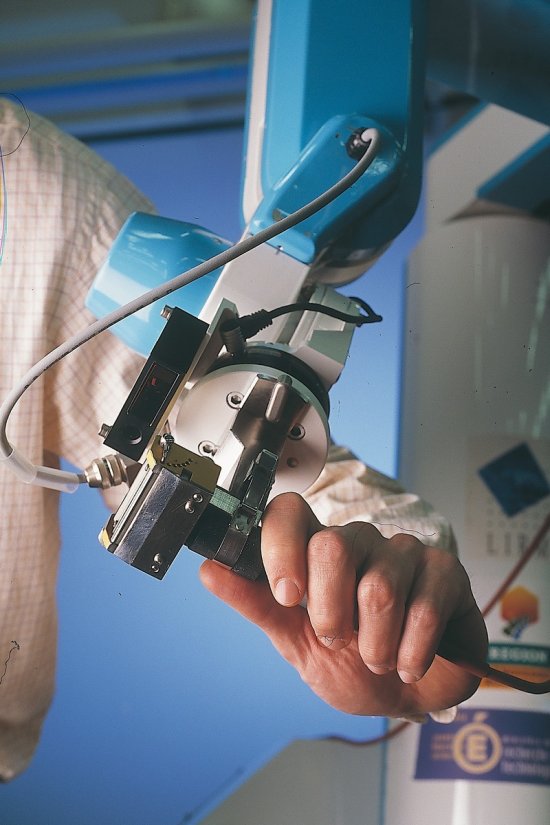
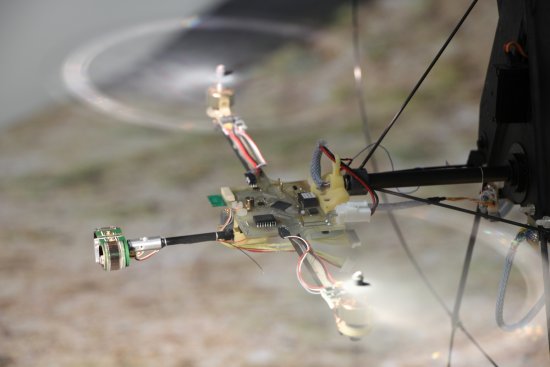
Microrobtics and haptic system technology at the ISIR
Second part of a photo report on the Institute for Intelligent Systems and Robotics (ISIR), devoted to microrobtics and haptic system technology.


















CNRS Images,
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.