Production year
2020

© Cyril FRÉSILLON / ISIR / CNRS Images
20200028_0006
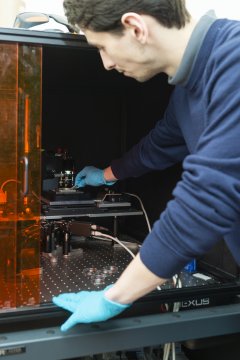
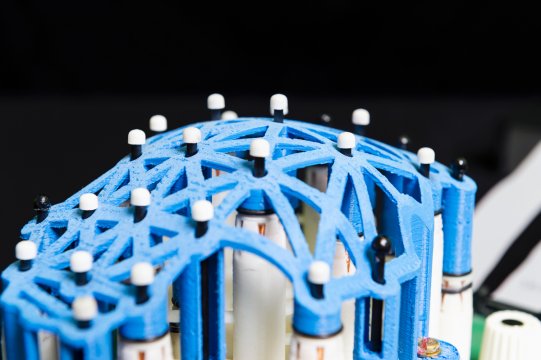
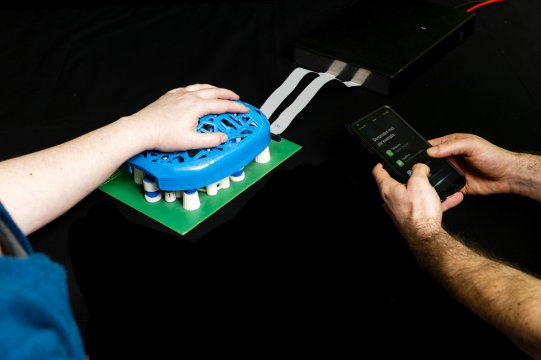
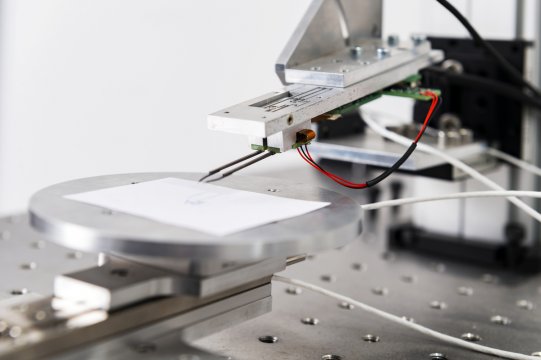
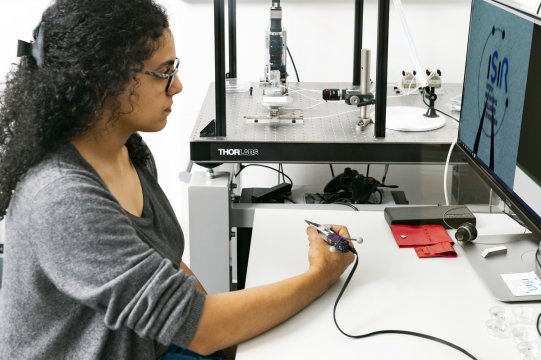
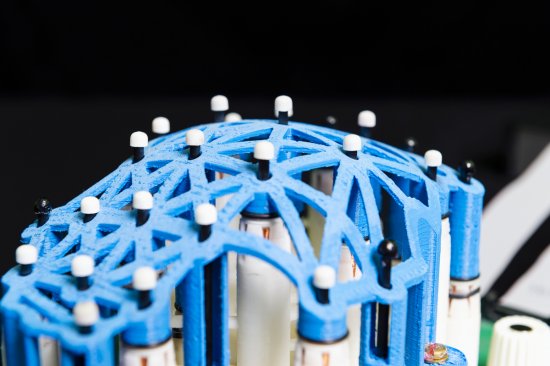
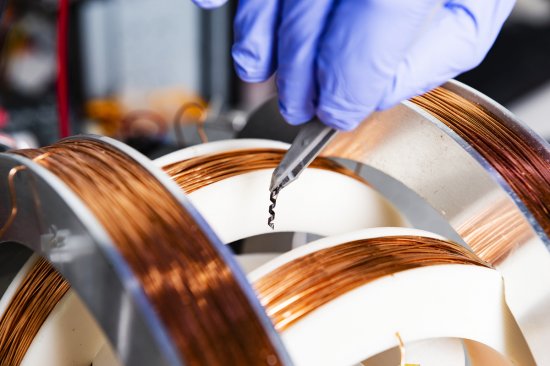
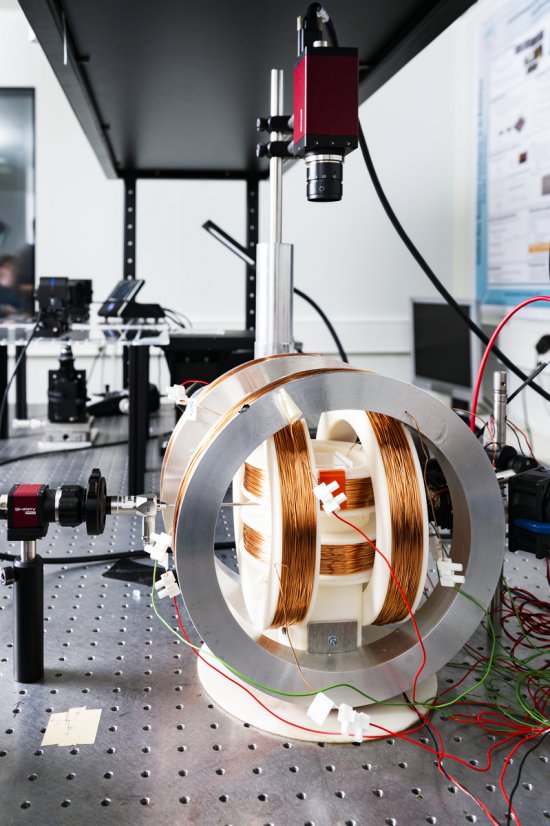
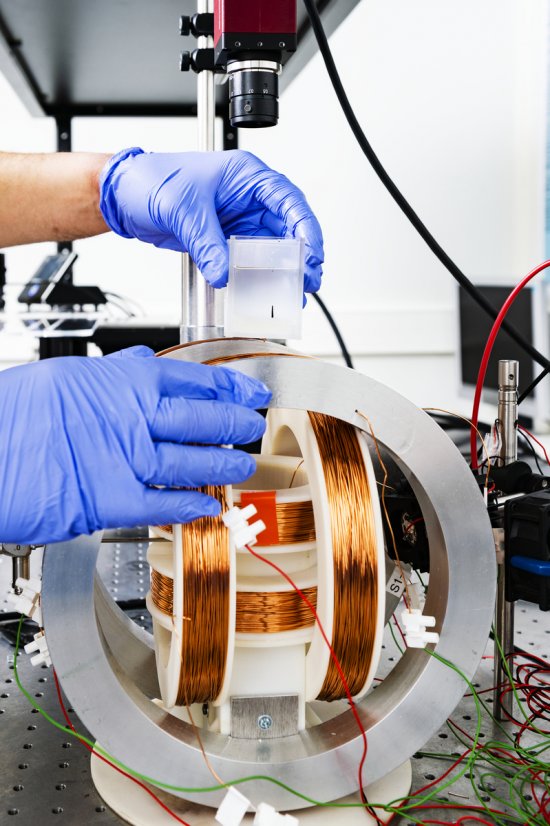
Insertion d’un robot nageur dans une plateforme de microrobotique mobile permettant de contrôler la trajectoire de micronageurs par actionnement magnétique. Le dispositif possède deux caméras qui permettent un retour visuel, via la reconstruction 3D d’environnement, pour détecter la position du nageur et contrôler sa trajectoire. A l’heure actuelle, le contrôle hors plan est à l’étape de la preuve de concept et les nageurs sont encore de taille centimétrique. Leur forme hélicoïdale leur permet de se déplacer efficacement en milieu visqueux. A terme, ils pourraient être utilisés pour des analyses sanguines dans le cadre de laboratoires sur puce (lab-on-a-chip), des dispositifs intégrés miniaturisés rassemblant une ou plusieurs fonctions de laboratoire.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2020
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.