Année de production
2020

© Cyril FRÉSILLON / ISIR / CNRS Images
20200021_0002
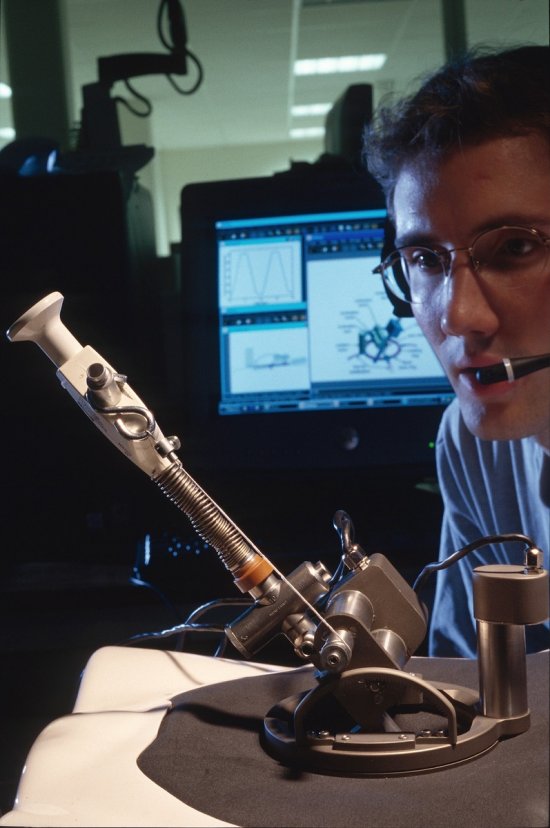
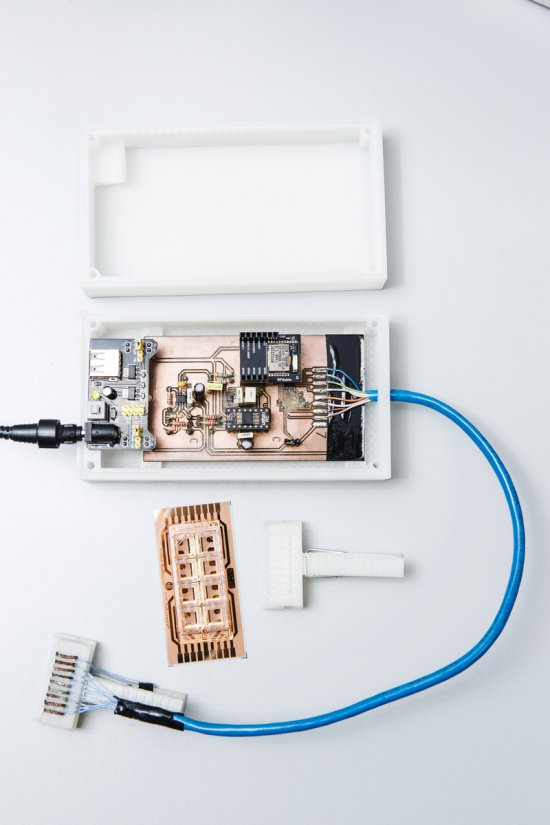
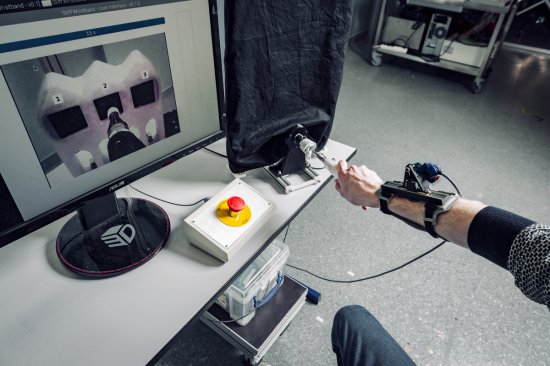
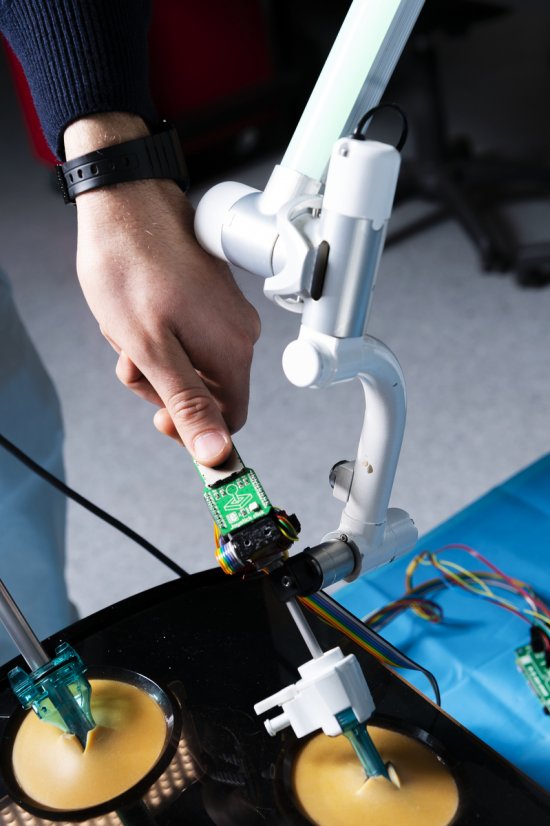
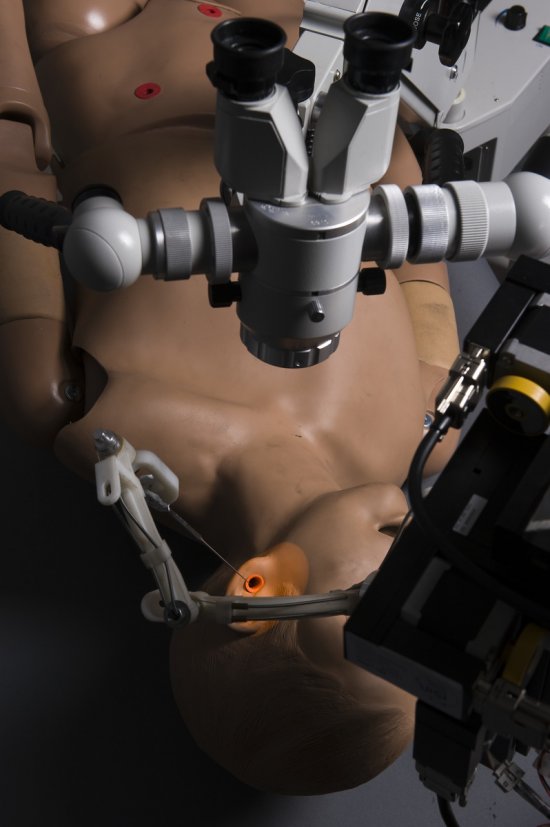
Test d’un système robotisé d’assistance à la chirurgie cœlioscopique. Cette technique permet d’observer l’intérieur de la cavité abdominale et d’intervenir sur les organes, grâce à des instruments (caméra et instruments chirurgicaux) insérés dans la paroi abdominale via de petites incisions. Elle réduit le risque de complications pour le patient mais comporte des spécificités pour le chirurgien : distorsion haptique (du sens du toucher), ergonomie, poids et encombrement des instruments, gestion de la caméra, etc. Ce système robotisé vise à améliorer le confort, l’autonomie et la précision du chirurgien lors des procédures. C’est le bras robotisé qui porte le poids des instruments, ce qui réduit le besoin d’un assistant, et qui positionne automatiquement la caméra de façon à avoir toujours la pointe de l’instrument au centre de l’image. Le robot filtre les tremblements de la main du chirurgien, qui peut également circonscrire la zone d’action des instruments grâce à la réalité augmentée.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2020
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.