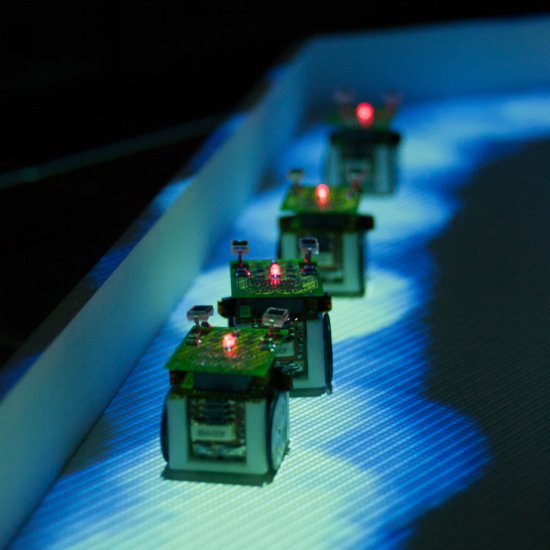
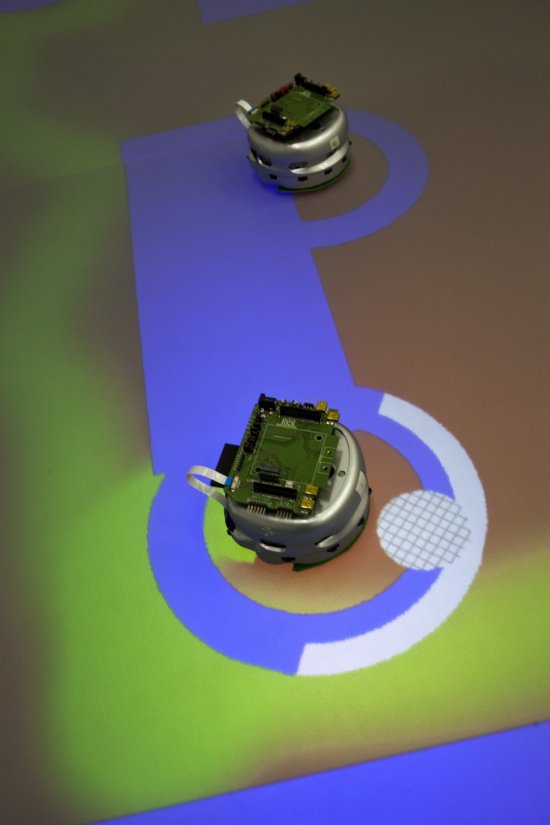
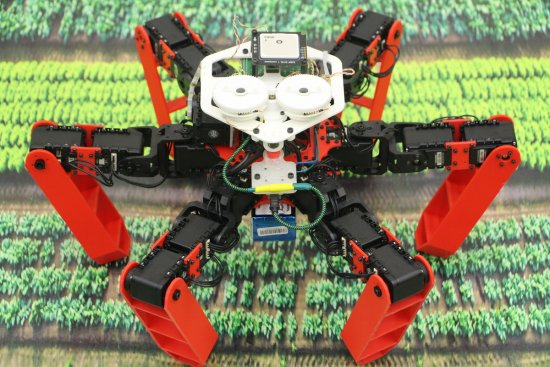
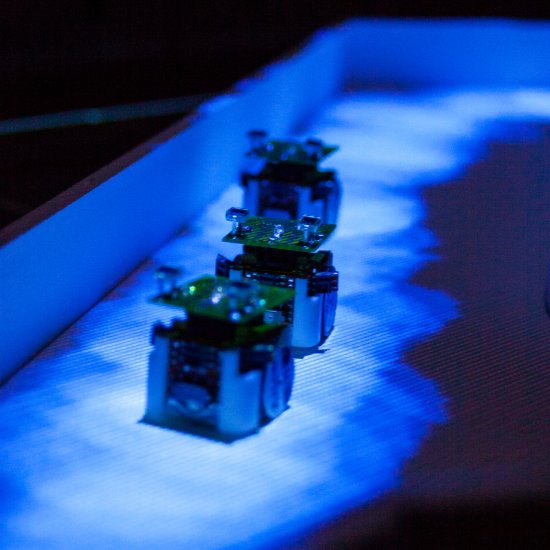
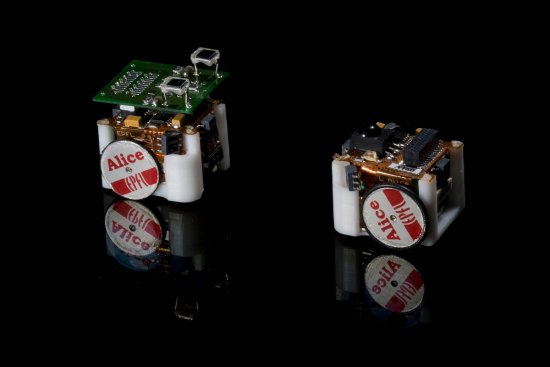
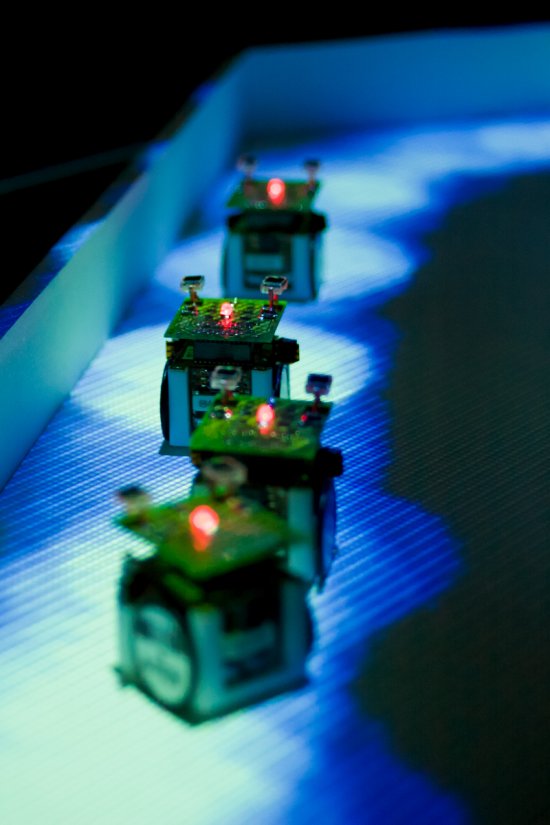
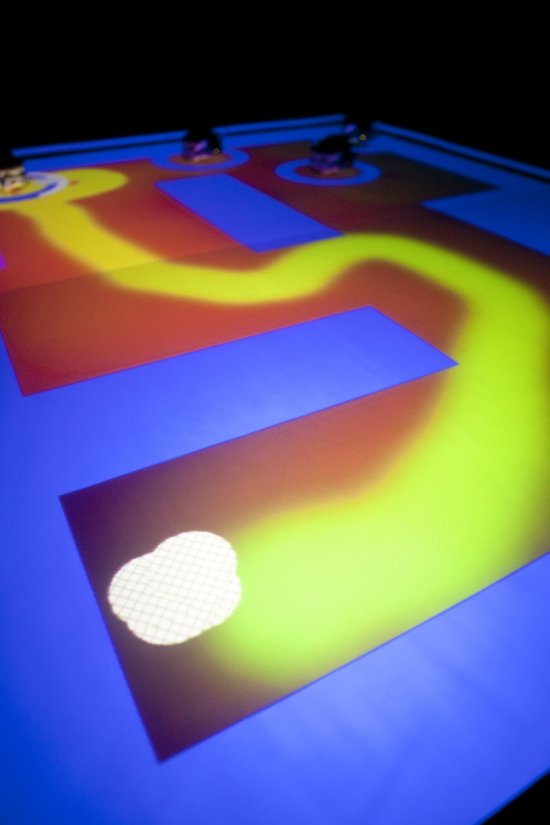
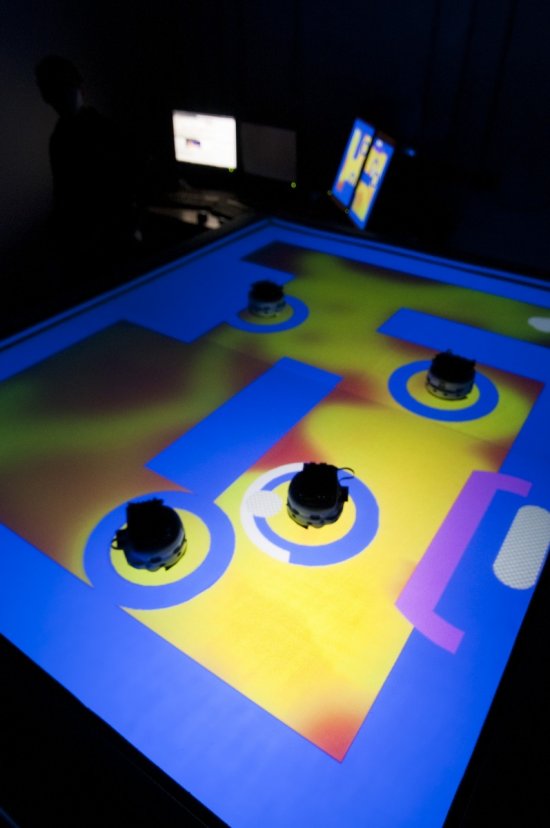
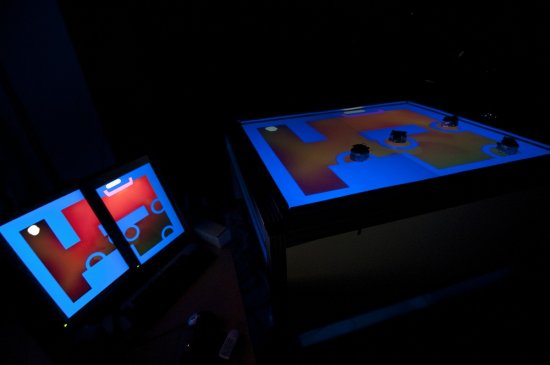
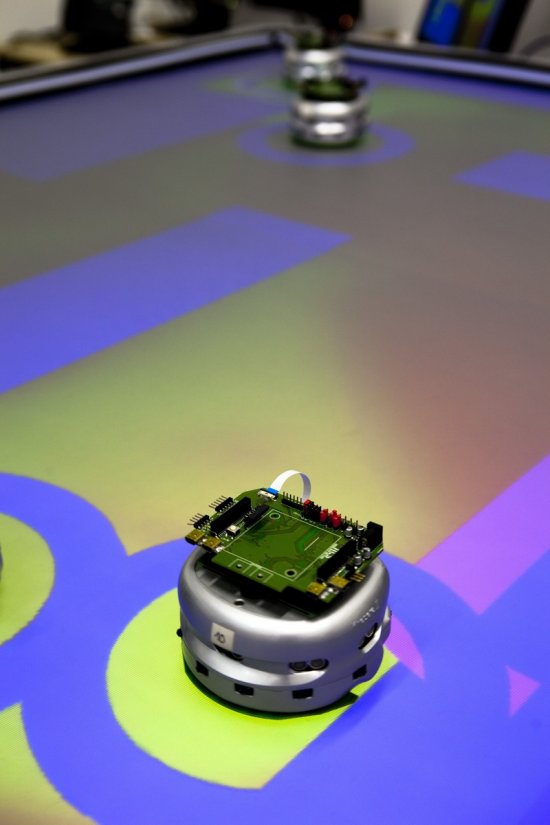
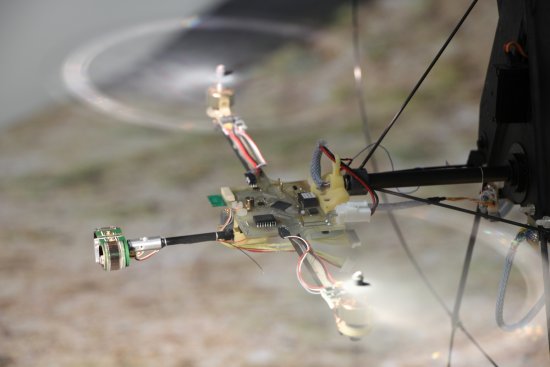
Microrobots dont l'algorithme a été inspiré par les comportements sociaux de certains animaux ou insectes
© David VILLA / ScienceImage, CBI / CRCA / CNRS Images
Voir le médiaDossier
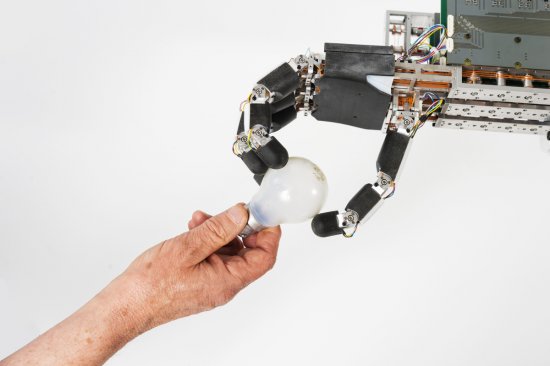
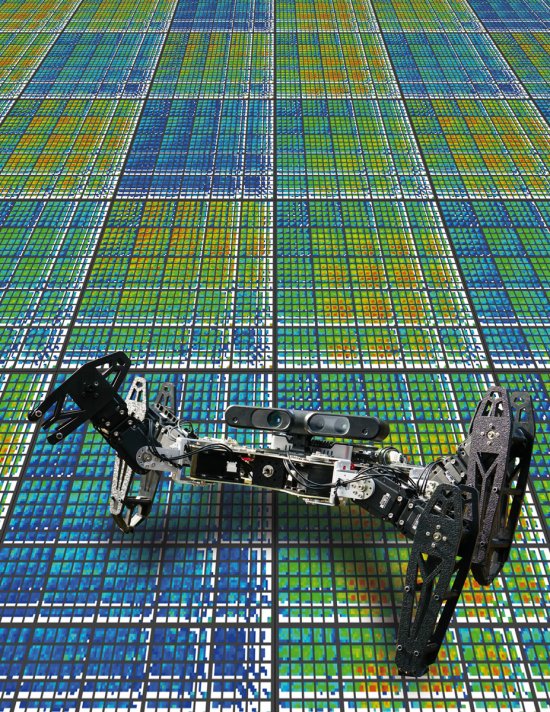
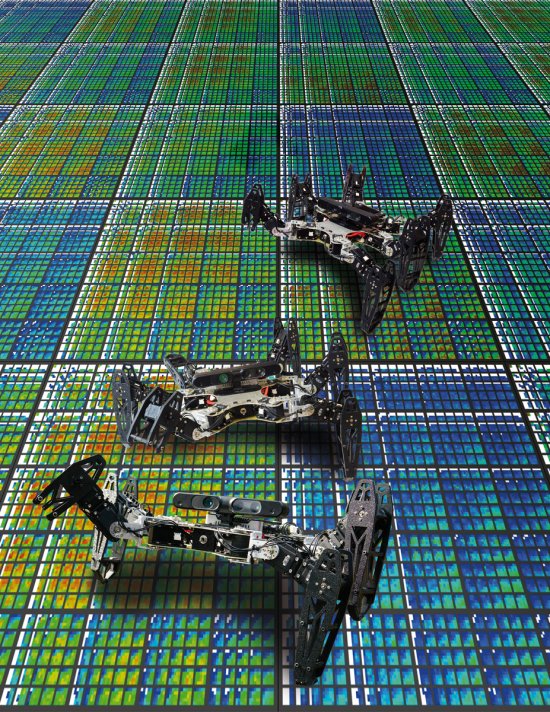
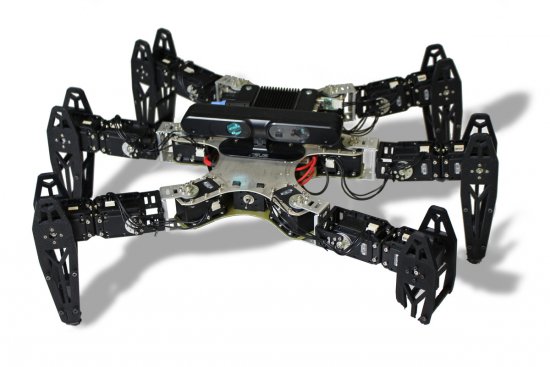
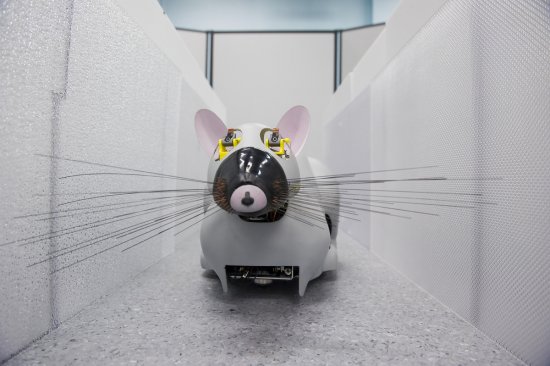
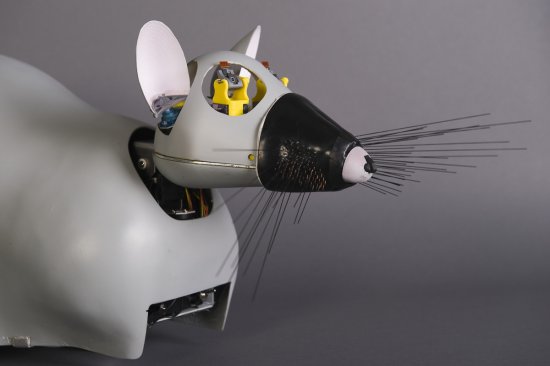
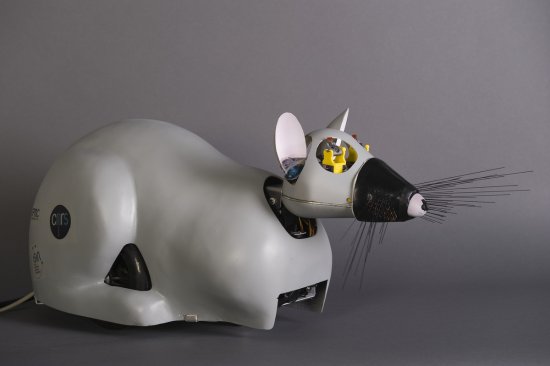
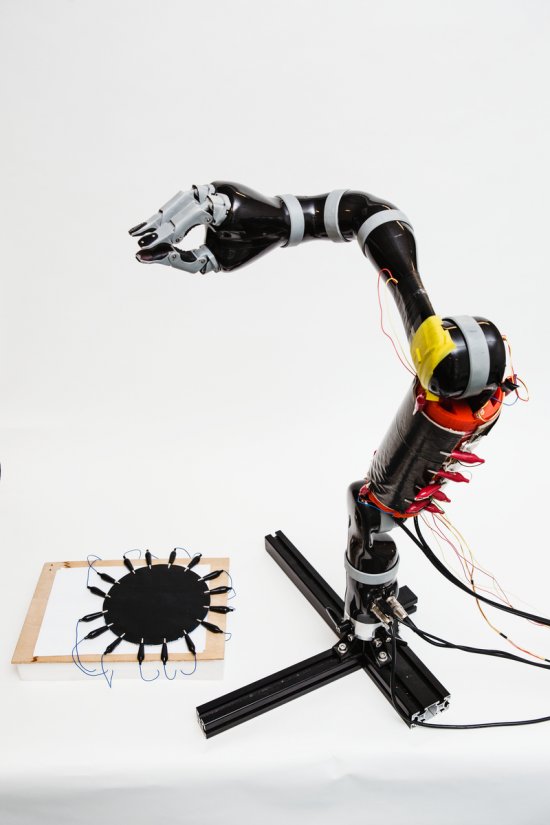
Pour créer de meilleurs robots, il faut regarder… le monde du vivant !
© David VILLA / ScienceImage, CBI / CRCA / CNRS Images
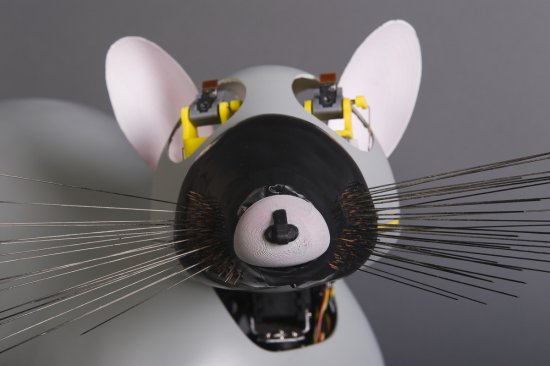
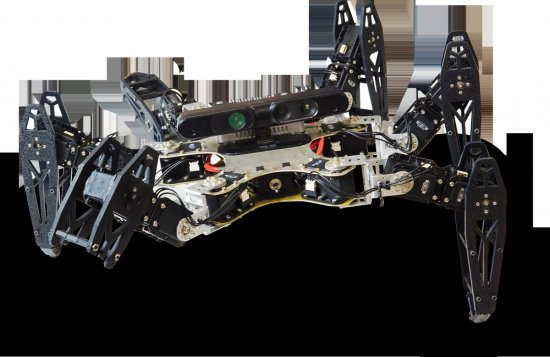
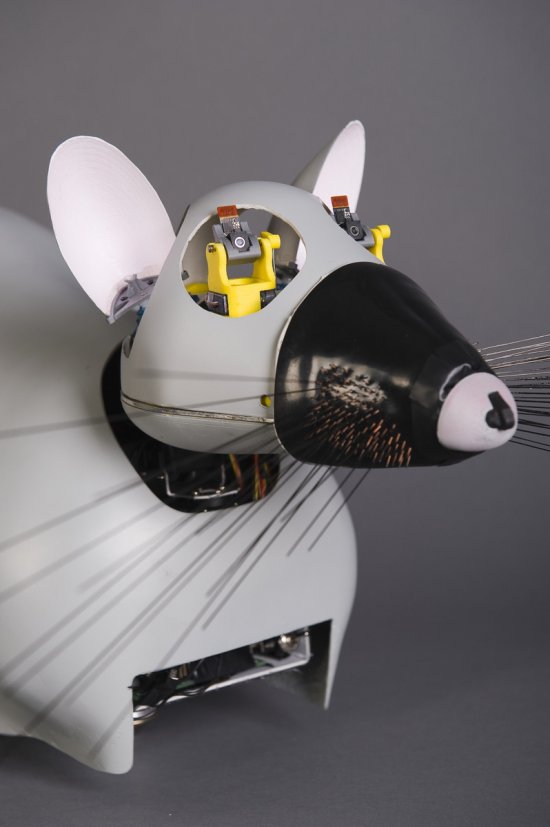
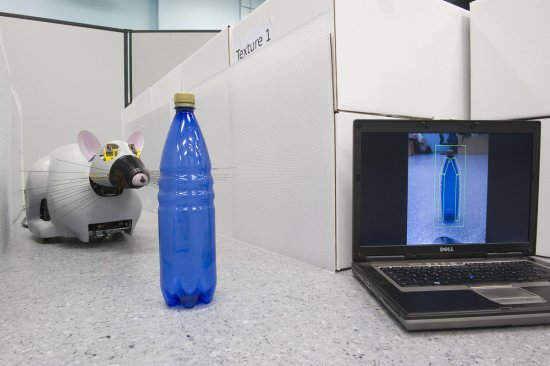
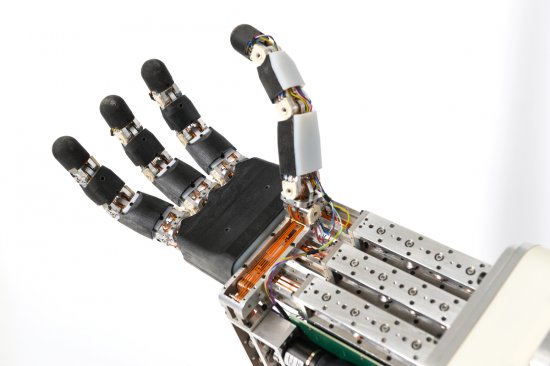
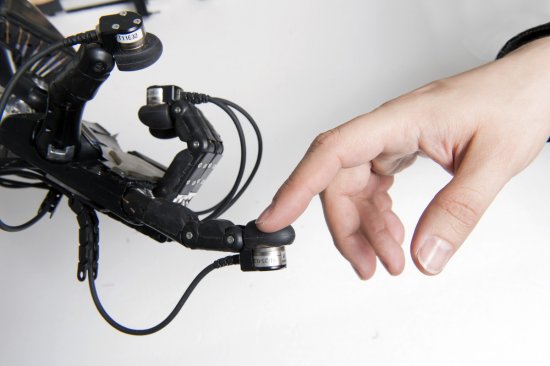
Voir le médiaLes milliards d’années d’évolution ont permis aux organismes vivants de relever tous les défis liés à la locomotion, la perception et l’interaction avec le monde environnant. C’est donc tout naturellement que les roboticiens d’aujourd’hui s’inspirent du vivant pour améliorer leurs machines. Découvrez, dans ce dossier thématique, ces robots dits “bio-inspirés” ou “bio-mimétiques” capables de se déplacer comme des fourmis ou des rats, de voler comme des insectes ou de se déplacer en groupe comme des bancs de poissons.
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.