Année de production
2016

© Frédérique PLAS / ETIS / UCP / ENSEA / CNRS Images
20160097_0117
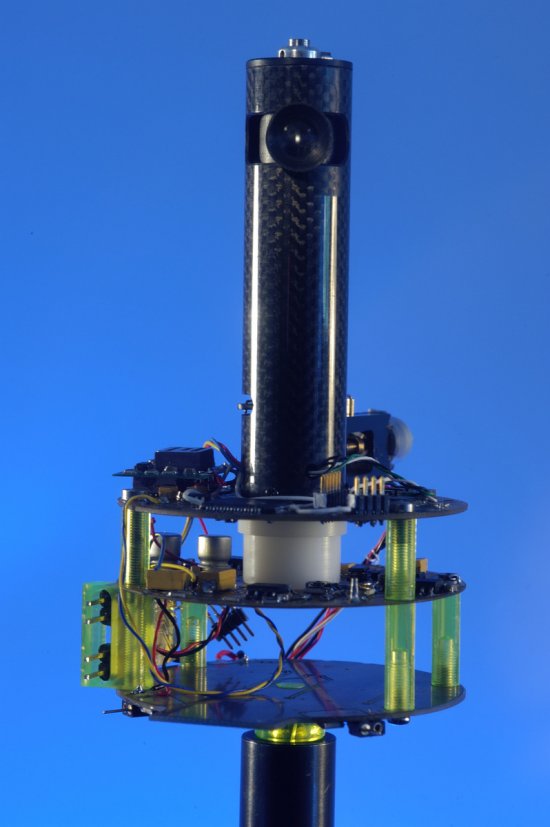
Robot souple et bio-inspiré basé sur la tenségrité pour modéliser la colonne vertébrale humaine ou la structure d'un serpent. Le contrôle de ce robot requiert la compréhension du contrôle neuronal au niveau de la moelle épinière pour la réalisation de synergies motrices par les générateurs rythmiques (central pattern generators). Ce projet est financé par la chaire d'excellence UCP-CNRS - Robotex.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2016
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.