Année de production
2012

© Cyril FRESILLON / LORIA / CNRS Images
20120001_0822
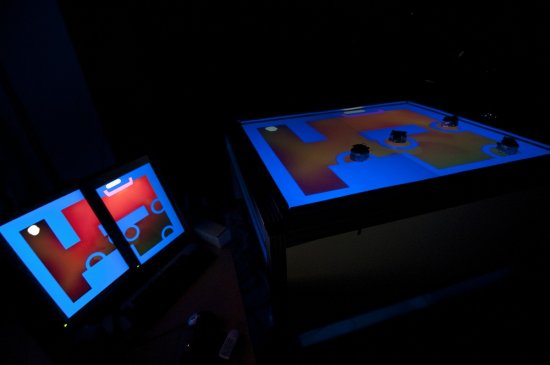
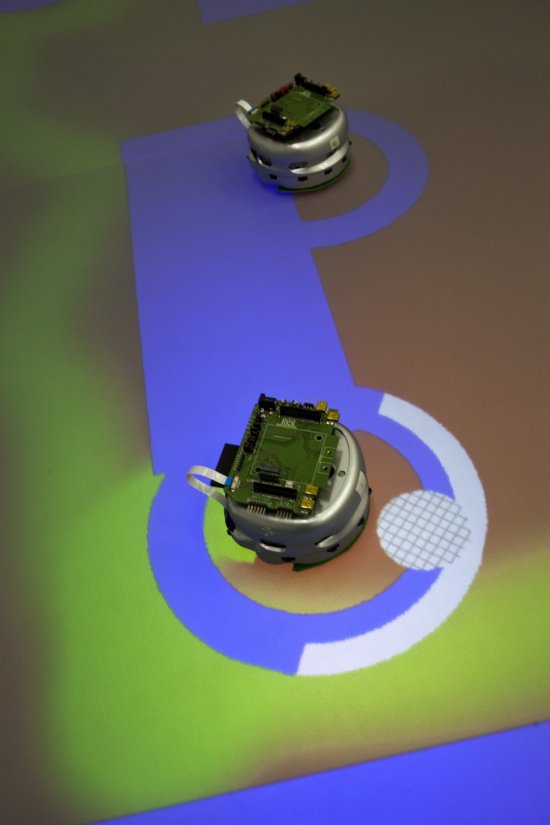
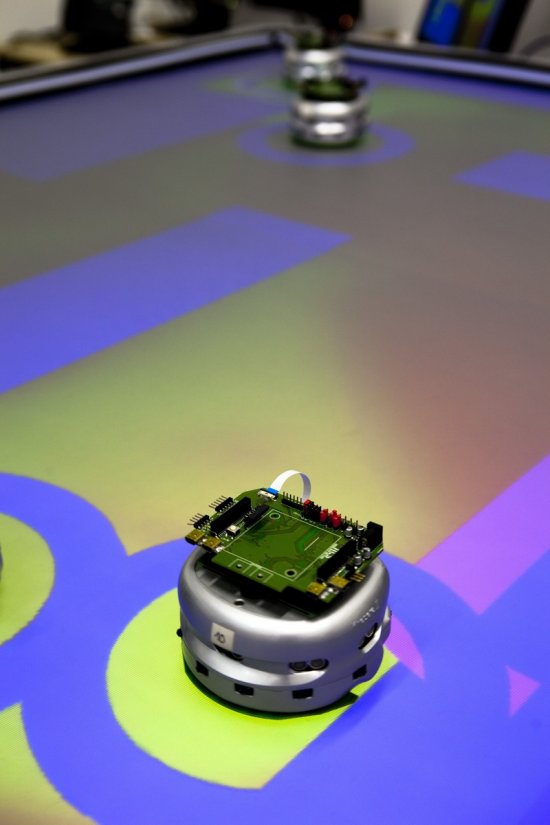
"Table interactive pour robots" formant une arène dans laquelle évoluent des robots mobiles autonomes. Ici, la table illustre un algorithme de recherche et de transport de ressources dans un environnement inconnu, inspiré du "fourragement" des fourmis, reposant sur le dépôt de phéromones entre ressources et nid. Un système de vidéo-projection permet d'afficher à la surface de la table toute représentation graphique d'un environnement dynamique. La table peut localiser les robots, détecter un objet, la pression d'un doigt, etc. Les robots sont capables de percevoir l'image projetée, d'en déduire un comportement de navigation et aussi modifier l'environnement par inscription (dépôt d'une phéromone digitale). L'objectif de cette table est la compréhension des mécanismes fondamentaux de l'intelligence collective.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2012
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.