Année de production
2019

© Philippe GAUTHIER / ISIR / CNRS Images
20210137_0014
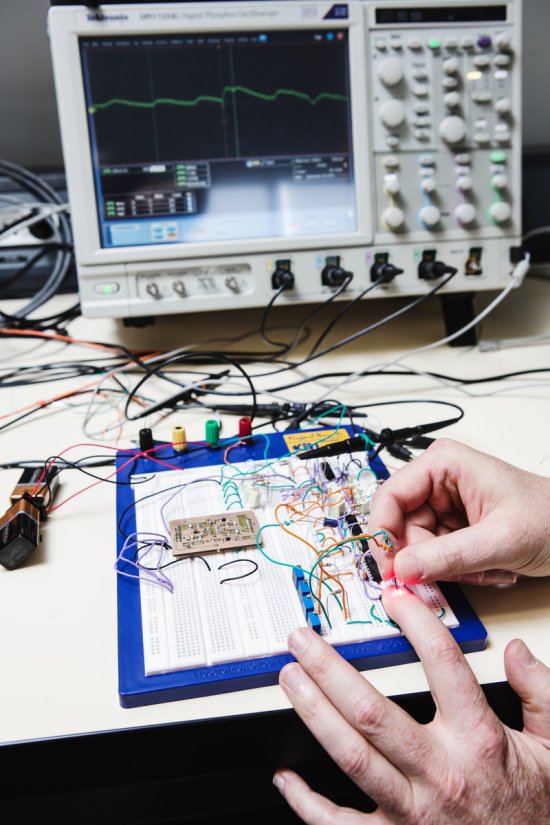
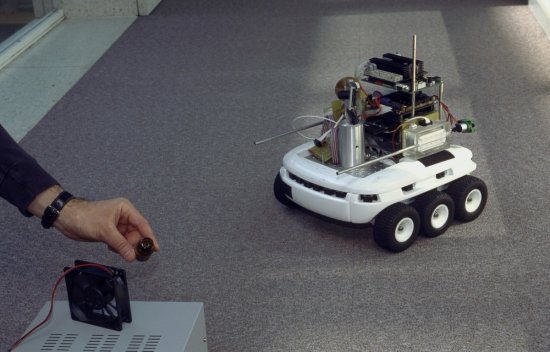
Pour PR2, robot de service autonome, se repérer dans un environnement inconnu est une tâche complexe mais loin d’être impossible ! À l’aide de sa caméra 3D située sur sa "tête" et de son dispositif de capture optique de mouvement, PR2 est capable de percevoir ce qui l’entoure et apprend à voir ce qu’il peut déplacer, soulever ou enfoncer en utilisant sa pince. L’écran nous montre ici la représentation de son environnement en construction. Les petits objets avec lesquels le robot a appris qu’il pouvait interagir sont représentés en jaune. Interactions après interactions, PR2 parvient ainsi, grâce à un algorithme d’apprentissage, à construire sa propre vision du monde reposant sur ses capacités. Cette image est lauréate du concours La preuve par l’image (LPPI) 2021.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2019
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.