Production year
2019

© Philippe GAUTHIER / ISIR / CNRS Images
20210137_0014
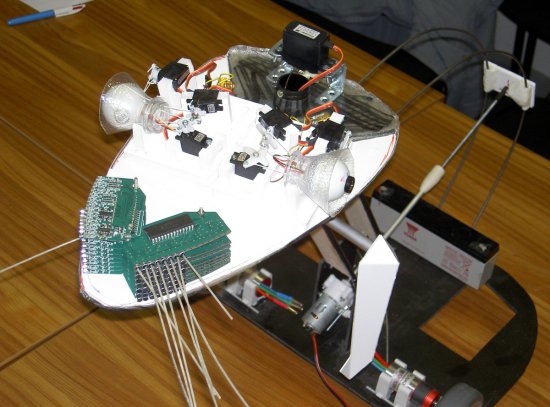
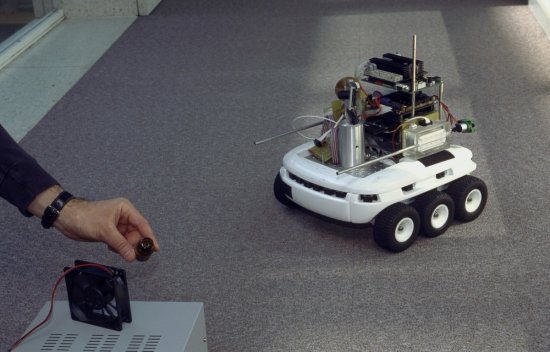
For PR2, an autonomous service robot, finding its way around an unfamiliar environment is certainly a complex task, yet by no means impossible! Using the 3D camera located on its “head” and its optical motion capture system, PR2 can sense its surroundings and learn to see what it can move, lift or press using its gripper. The screen displays the representation of the ongoing construction of its environment. The small objects that the robot has learned it can interact with are shown in yellow. Interaction upon interaction, PR2’s learning algorithm enables it to use its skills to build its own view of the world. This image is a winner of the 2021 La preuve par l'image (LPPI) competition.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2019
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.