Programme(s)
Année de production
2020

© Dorian GUILLEMAIN / OSU Pythéas / CNRS Images
20230006_0001
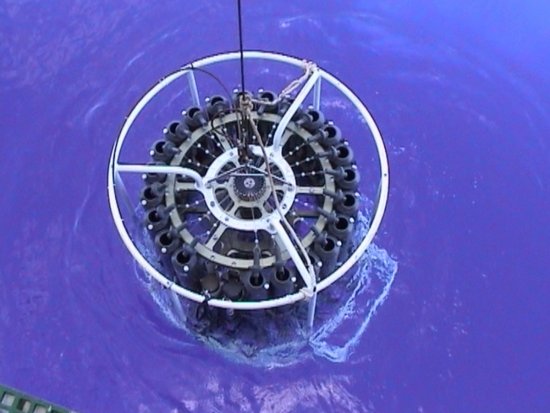
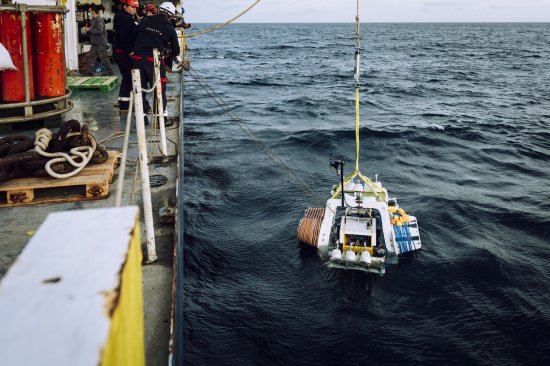
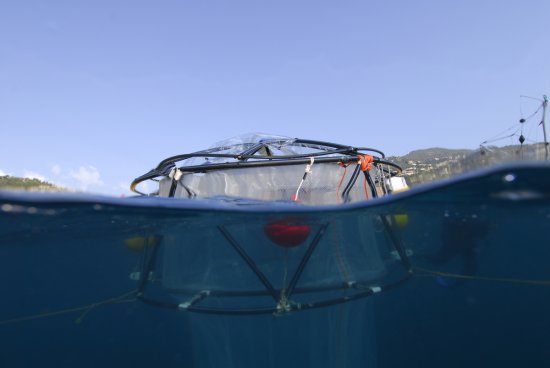
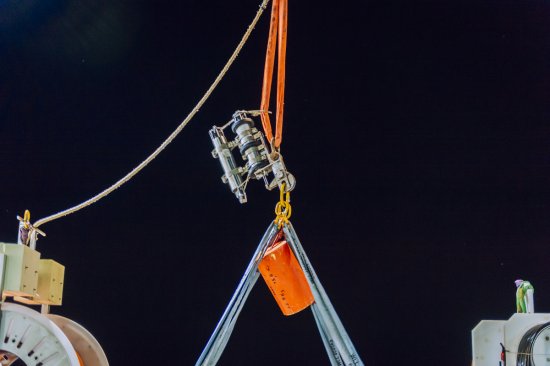
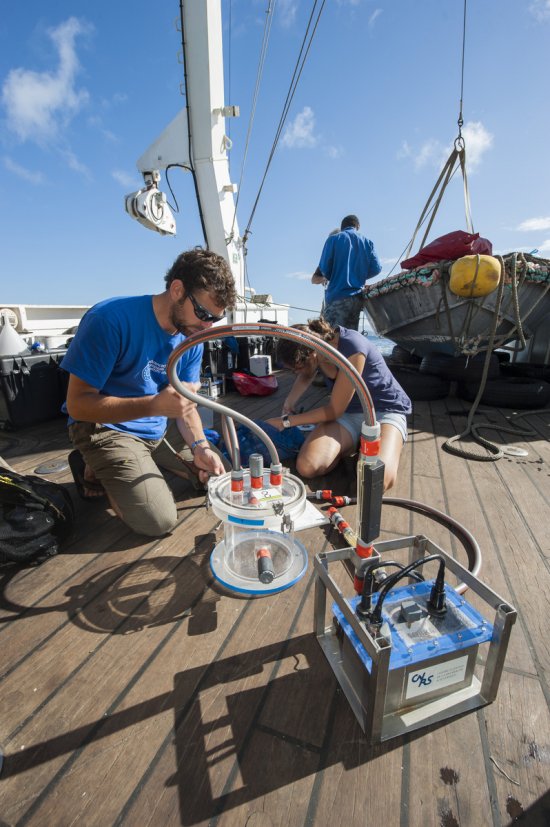
Test en bassin du rover sous-marin benthique BathyBot. Des essais sont réalisés à quelques mètres de profondeur avant de le déployer sur le site de l’observatoire sous-marin EMSO-LO, à 2 500 m de profondeur au large de Toulon. Ce robot d’exploration téléopéré via Internet est dédié au suivi sur le long terme de l’environnement, l’écologie et des potentiels impacts du changement climatique dans les grands fonds. Il sera installé en permanence sur le site d'EMSO-LO où il récoltera des données environnementales (température, salinité, pression et courant) et biologiques. Sa caméra hypersensible lui permet notamment d’observer la bioluminescence émise par les organismes marins. Ces données viendront compléter les études ponctuelles réalisées lors de campagnes océanographiques, pour prendre en compte les variations saisonnières et éventuellement observer des phénomènes imprévisibles. L’objectif est de mieux comprendre les dynamiques biogéochimiques (la transformation de la matière organique sous l’effet de processus biologiques, géologiques et chimiques) en milieu profond. BathyBot est développé par l'Institut Méditerranéen d'Océanologie (MIO) et la Division technique de l'INSU du CNRS.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2020
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.