
Reportage Photo
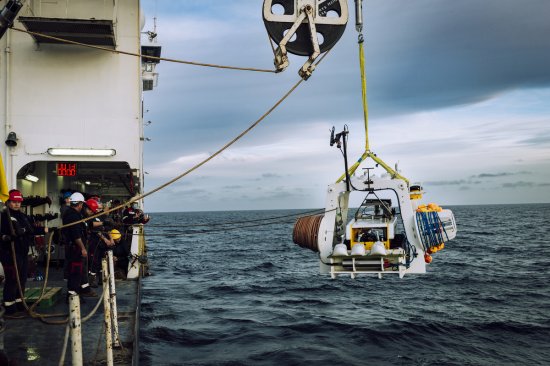
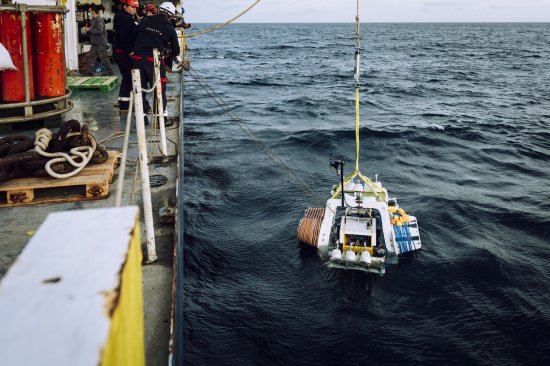
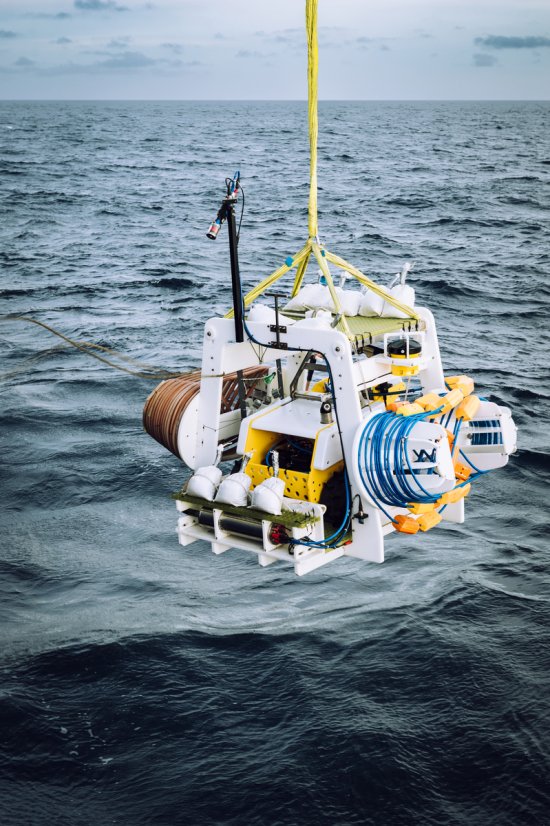
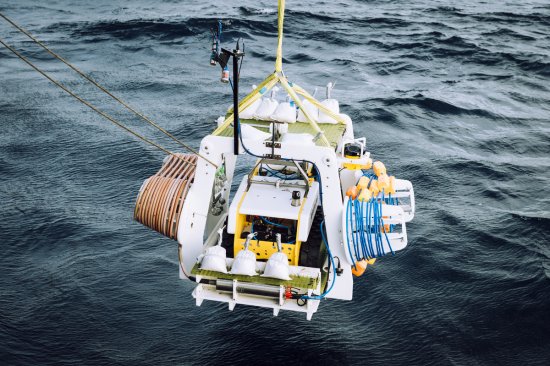
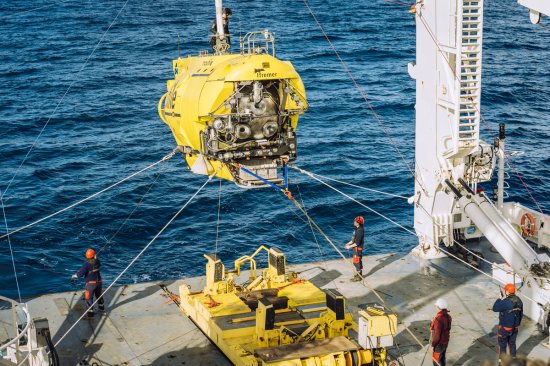
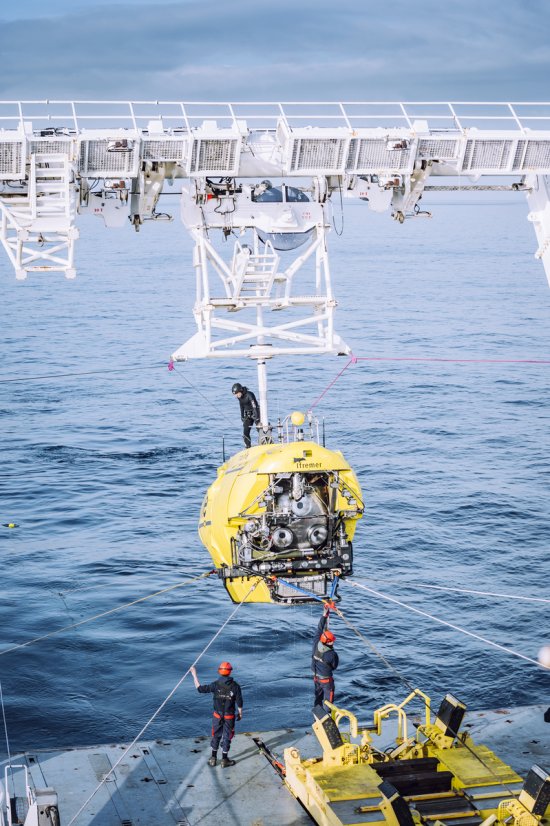
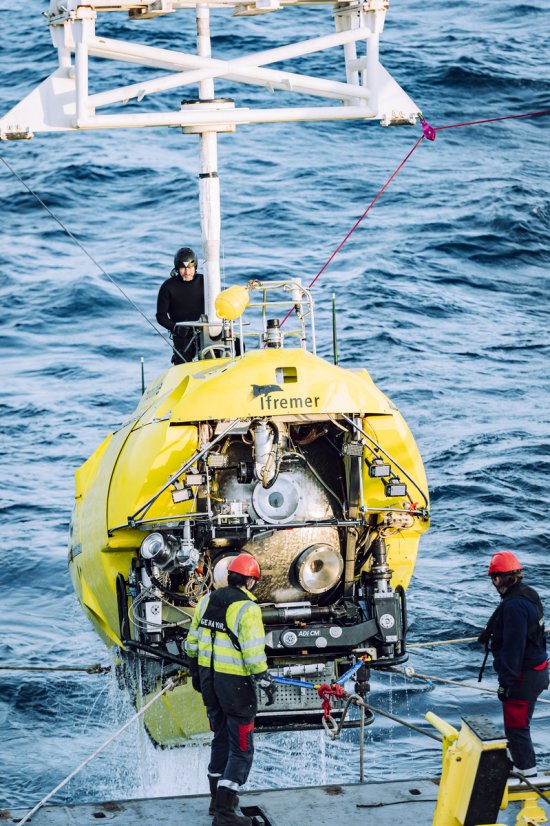
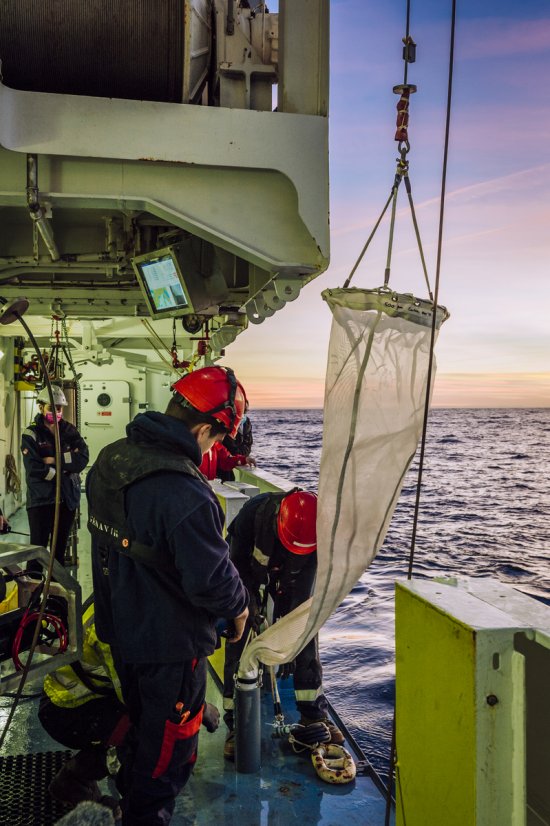
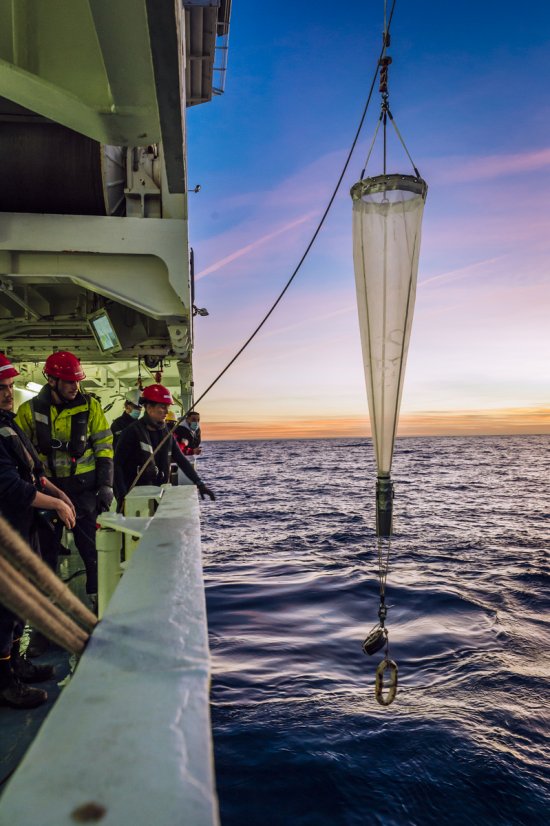
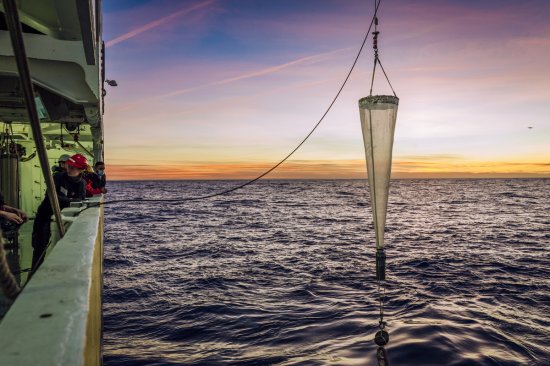
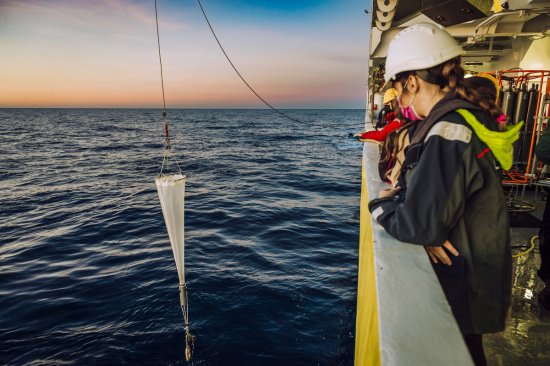
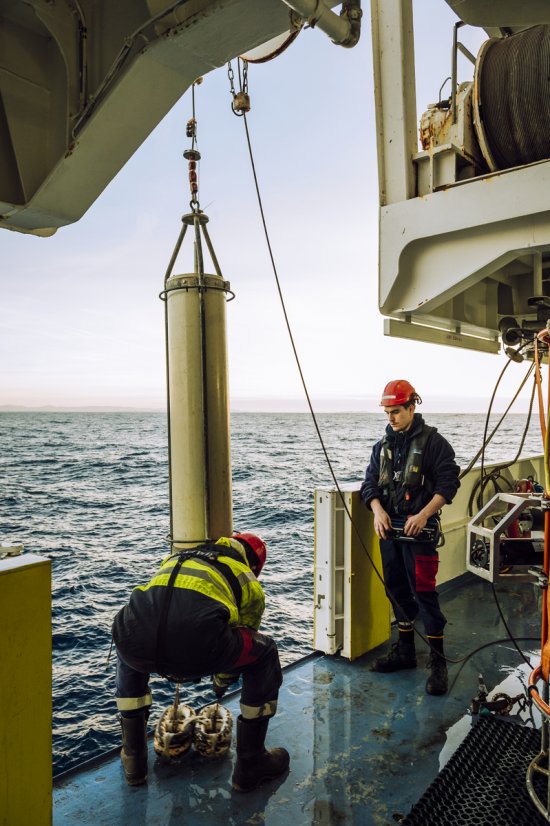
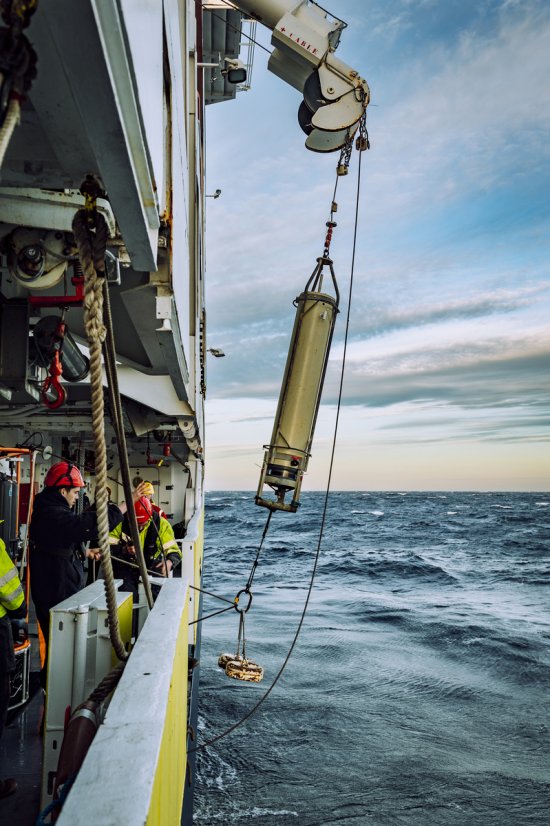
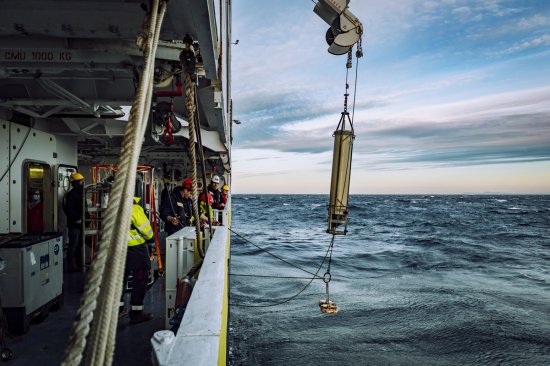
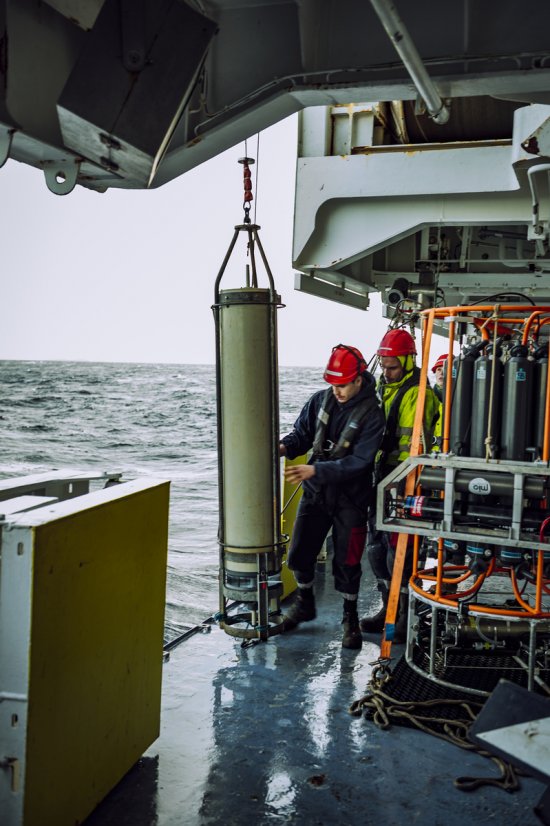
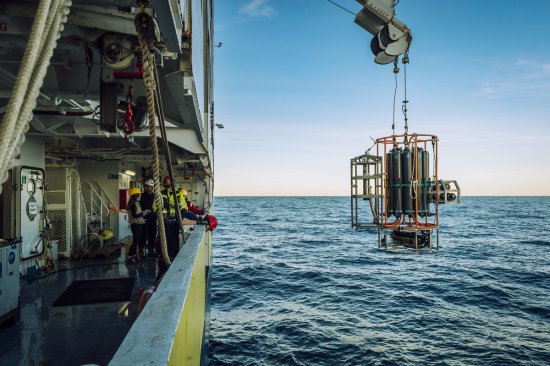
La BathyCruise
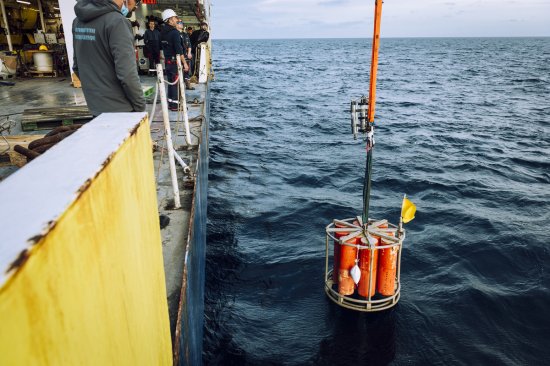
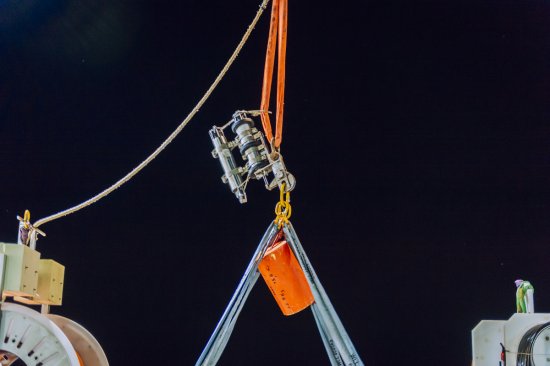
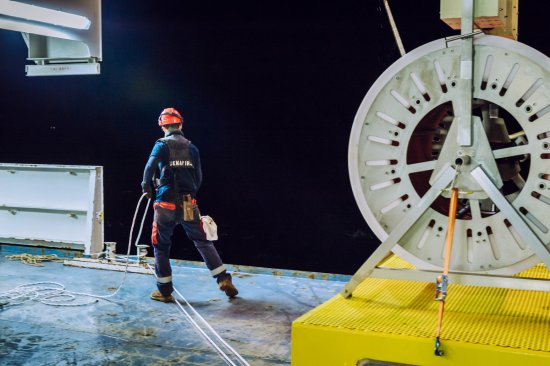
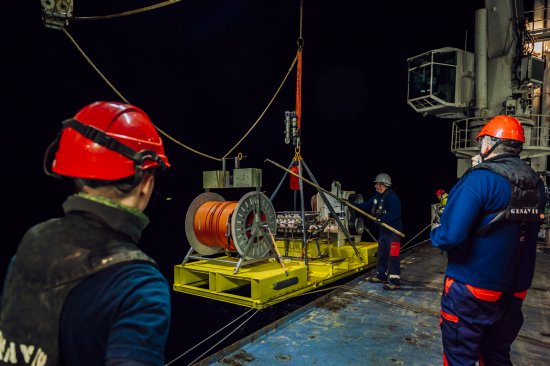
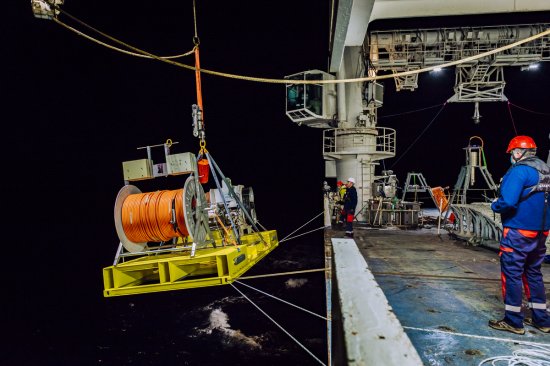
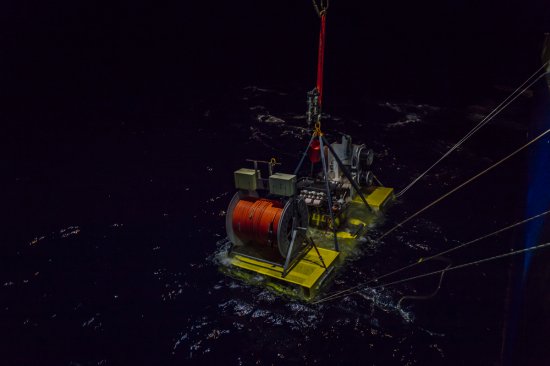
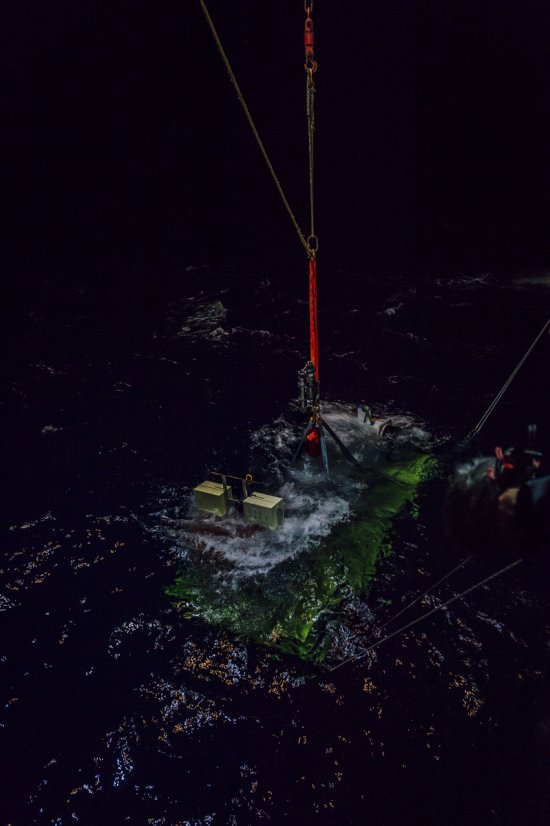
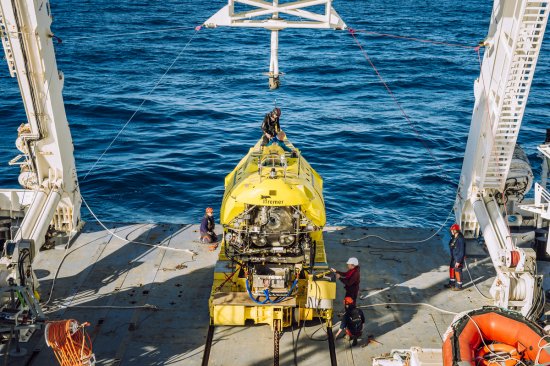
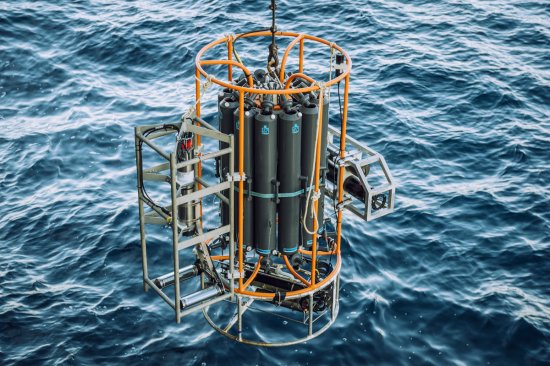
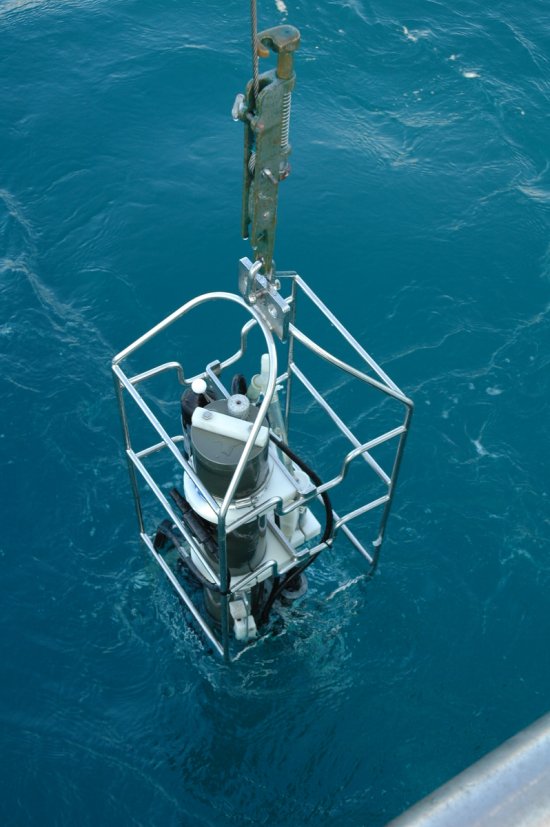
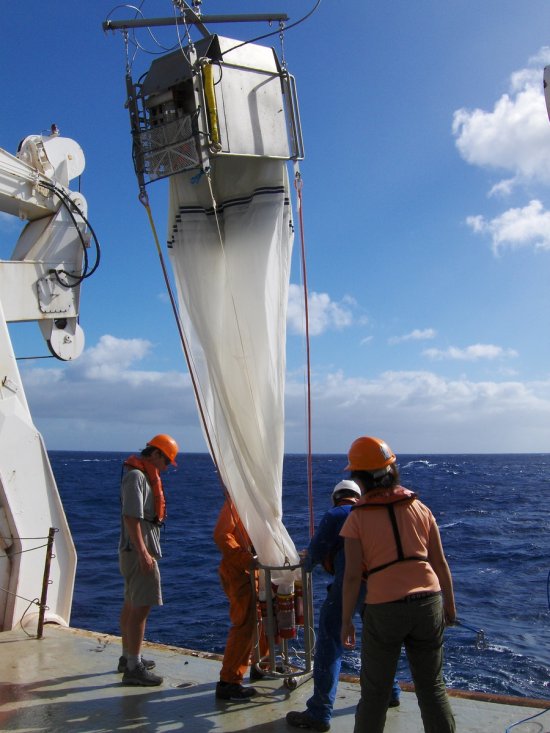
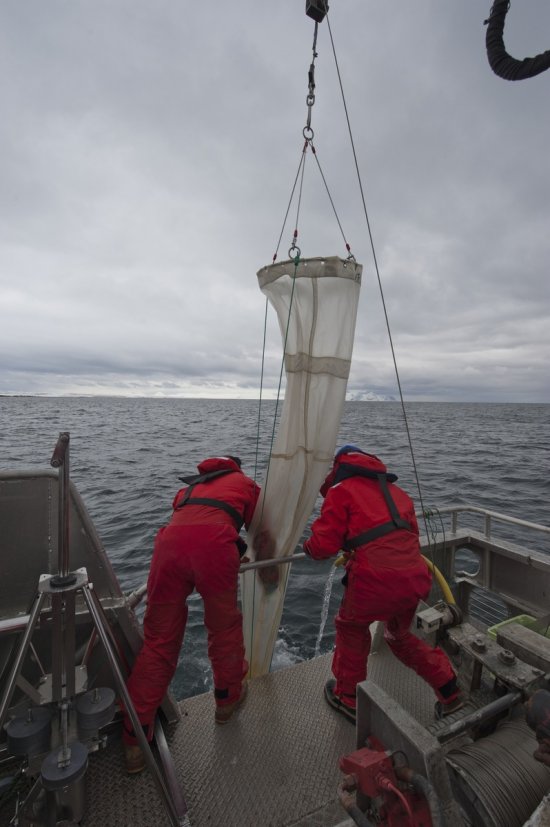
Suivez la campagne de mise à l’eau du rover sous-marin benthique BathyBot et d’autres dispositifs scientifiques sur le site de l’observatoire sous-marin EMSO-LO, depuis le navire océanographique Pourquoi pas ?
























































































CNRS Images,
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.