Année de production
2022

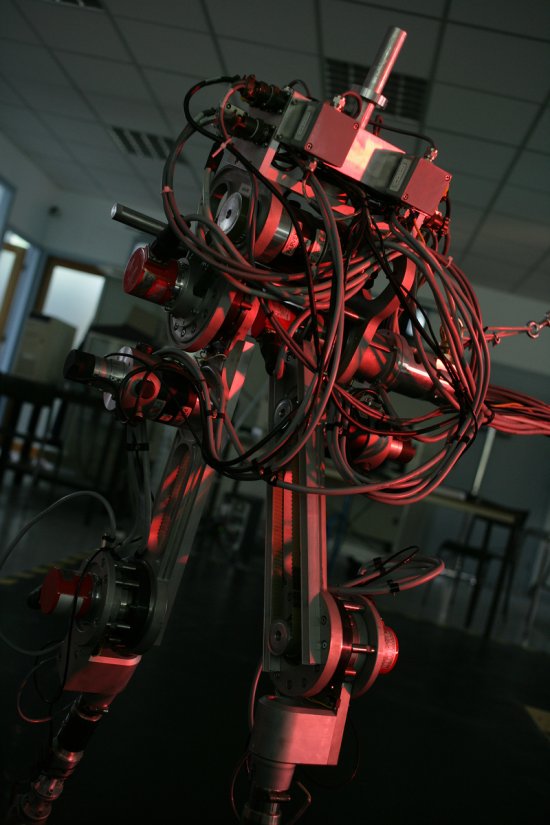
© Cyril FRÉSILLON / ISIR / CNRS Images
20220058_0014
Robots au comportement aléatoire dans une arène. Ils sont utilisés comme modèles en physique de la matière active dans le cadre de l’ANR Morpho-functional swarm robotics (MSR). Ce domaine étudie les organisations macroscopiques sur la base d’interactions microscopiques entre des particules en mouvement, comme les trajectoires des bactéries qui s’alignent à cause de leur forme, sans décision logique de leur part. De même, ces robots sont programmés pour aller tout droit mais développent des comportements différents quand ils entrent en collision avec un obstacle. En fonction de la forme de leurs exosquelettes, ils s’arrêtent, font demi-tour ou oscillent avant de repartir. Leurs trajectoires sont étudiées pour comprendre les causes physiques de leurs comportements et améliorer les équations de physique de la matière. Dans un second temps, ces robots sont aussi utilisés pour améliorer les algorithmes d’apprentissage social de robotique en essaim. Ces algorithmes permettent à des robots simples de développer des stratégies individuelles pour réaliser une tâche complexe à l’échelle du groupe, à partir de règles locales et en prenant en compte l’impact de leur morphologie sur leurs trajectoires.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2022
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.