Année de production
2022

© Cyril FRÉSILLON / ISIR / CNRS Images
20220058_0005
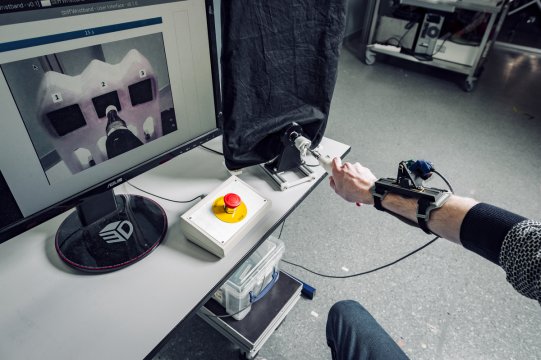
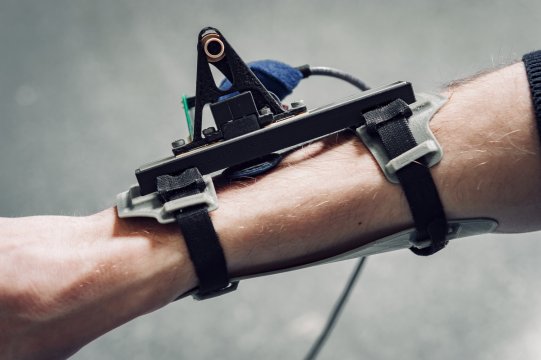
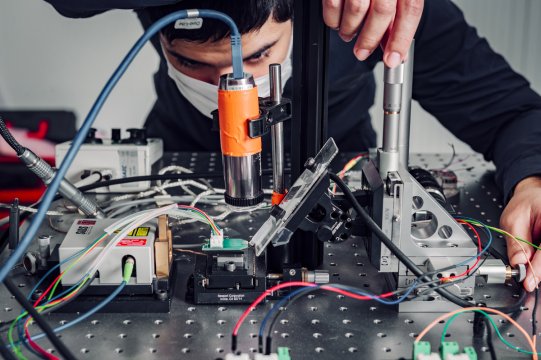
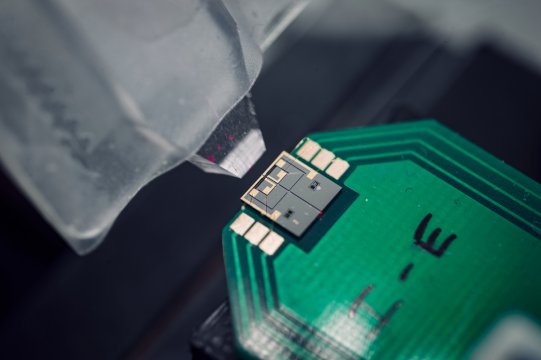
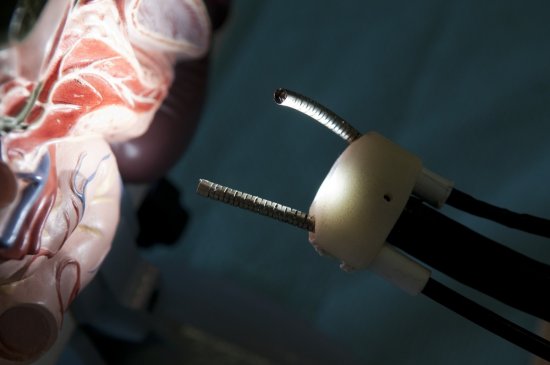
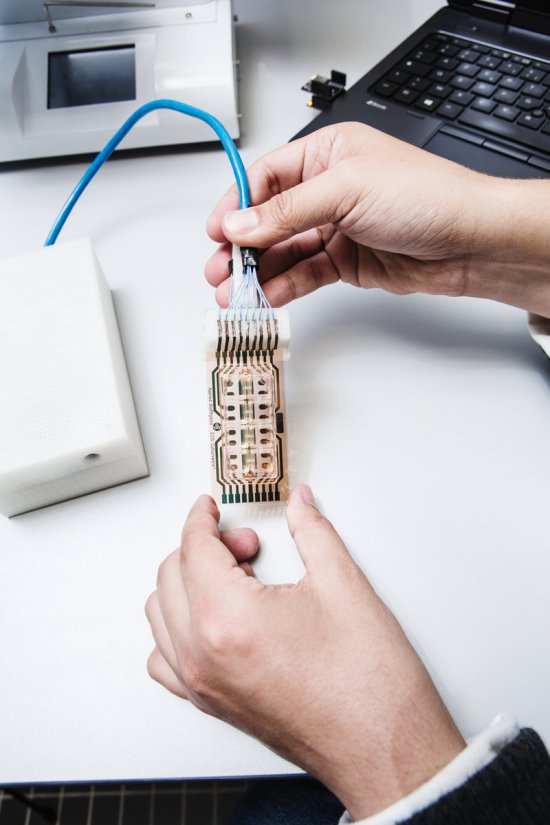
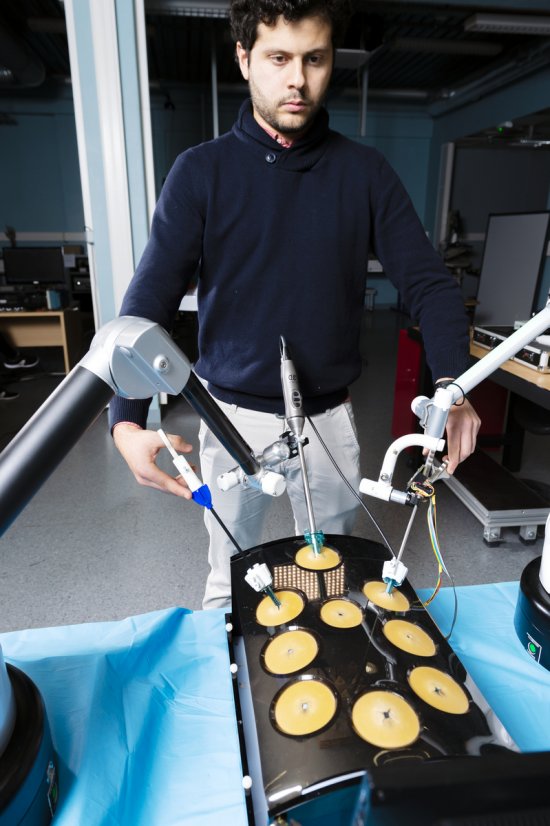
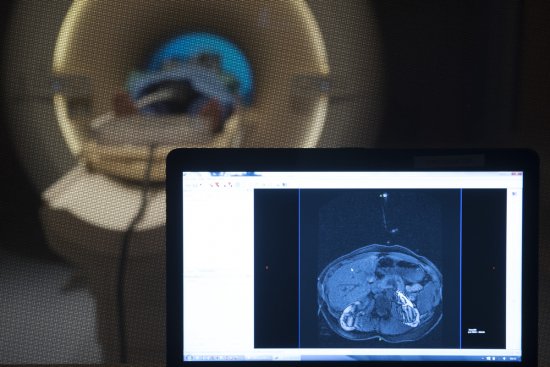
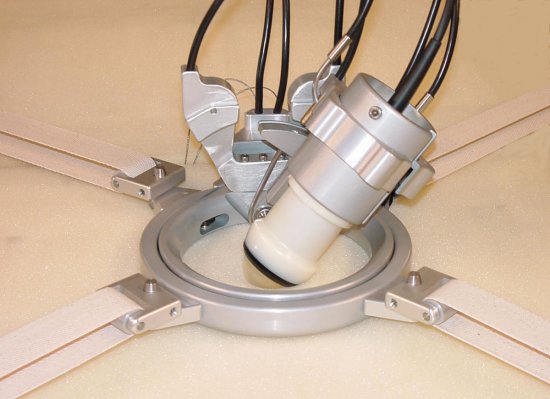
Opérateur déterminant la raideur d’échantillons cachés derrière un rideau, aidé par un robot d’assistance à la chirurgie cœlioscopique. La cœlioscopie permet d’intervenir sur les organes de l’abdomen sans ouvrir la paroi abdominale, en insérant une caméra et des instruments chirurgicaux via de petites incisions. Elle réduit le risque de complications mais nécessite une grande maîtrise technique de la part du chirurgien, qui doit notamment pallier les distorsions haptiques (perte du toucher et du retour d’effort). Pour juger la raideur des tissus, il estime l’effort qu’il applique en regardant la manière dont ceux-ci se déforment. Cette analyse, fruit d’une longue expérience, requiert un important effort de concentration. L’objectif du robot est de restituer cette information de manière intuitive, en utilisant le même canal sensoriel que la perception naturelle de l’effort, grâce à un bracelet muni d’un effecteur qui déforme la peau du bras proportionnellement à l’effort appliqué sur l'instrument. On limite ainsi la charge cognitive qui n’est pas consacrée à la chirurgie en elle-même. Ce robot est à l’état de preuve de concept et doit être adapté pour être utilisé en bloc opératoire. Thèse financée par le Labex CAMI.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2022
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.