Research program(s)
Production year
2022

© Cyril FRÉSILLON / ISIR / CNRS Images
20220058_0021
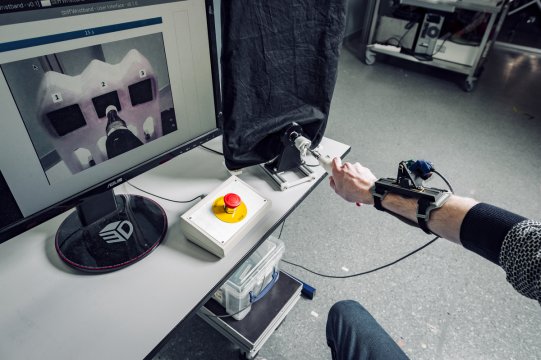
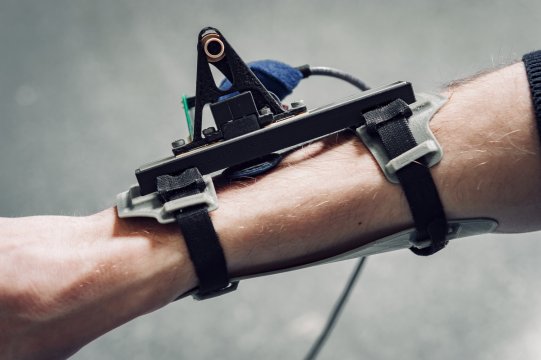
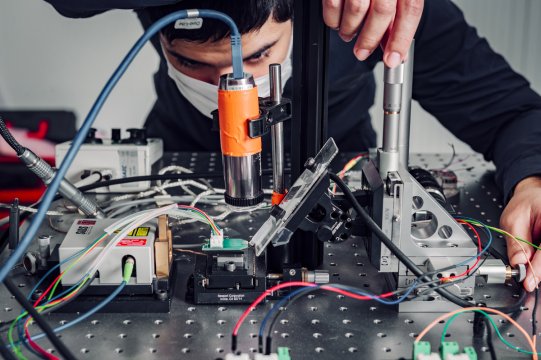
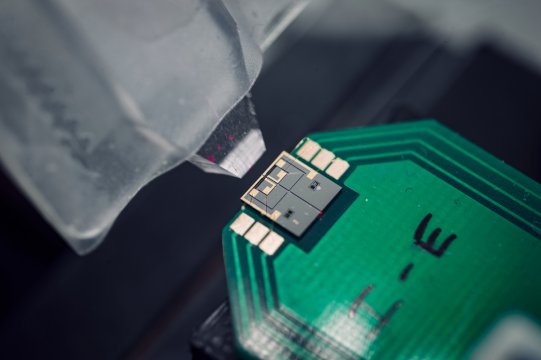
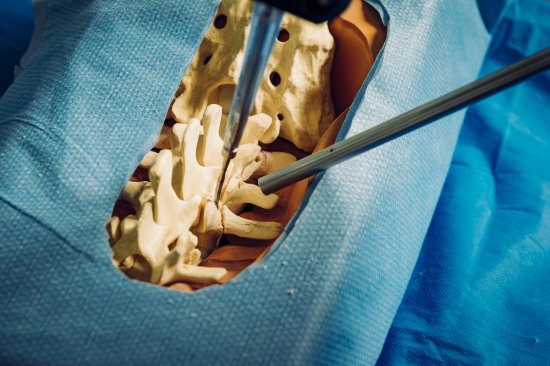
Sonde pédiculaire d’un robot de perçage automatisé pour le placement d'implants osseux. Cette sonde développée par la société SpineGuard est équipée d’un capteur DSG (dynamic surgical guidance) qui détecte la conductivité électrique des tissus. Des algorithmes d'interprétation des données en déduisent la nature du tissu et envoient un signal d’alerte si une brèche osseuse, source de complications pour le patient, est imminente. A l’heure actuelle, les robots chirurgicaux semi-autonomes visent la précision géométrique : ils suivent un itinéraire prédéfini établi à partir d’un modèle de la zone à opérer, réalisé avant l’opération par imagerie médicale. C’est le chirurgien qui tient compte des facteurs imprévisibles et reprend la main en situation difficile. Le projet Faros vise plutôt la précision fonctionnelle. Il développe des robots disposant de capacités de détection non visuelle, capables d’interpréter les données en cours d’opération pour réaliser des tâches en autonomie. L’ISIR apporte son expertise dans le contrôle robot pour améliorer la précision et contrôler la force des mouvements des bras robotiques, et faciliter leur manipulation.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2022
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.