Production year
2022

© Cyril FRÉSILLON / ISIR / CNRS Images
20220058_0016
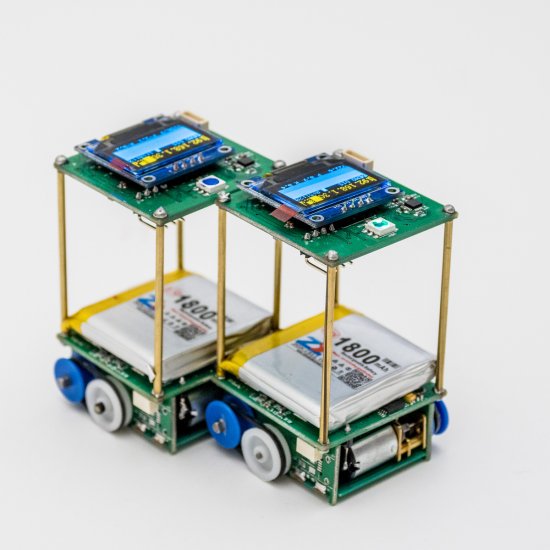
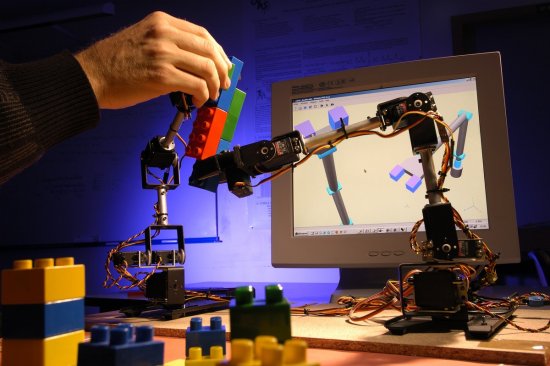
Robots mobiles lors d'une expérience de robotique en essaim. Durant une tâche de phototaxie, ces robots doivent s’agréger dans la zone lumineuse. En cas de collision, ils sont programmés pour faire face à l’obstacle ou s’aligner. Ces deux règles simples leur permettent de réussir une tâche complexe : ils évitent les murs et les autres robots grâce au comportement d’alignement et, une fois dans la zone lumineuse, ils s'arrêtent en faisant face aux autres robots. Il n’y a donc pas besoin de programmer un comportement d’arrêt. Durant une première phase d’observation, les trajectoires de robots ont été analysées pour comprendre les causes physiques de leurs comportements. Cette seconde phase permet de tester et d’améliorer les algorithmes d’apprentissage social. Grâce à ces algorithmes, chaque robot développe une stratégie pour atteindre efficacement son but, en prenant en compte les paramètres physiques préalablement observés. L’objectif est d’atteindre un phénomène d’auto-organisation, où la somme des décisions individuelles développe un comportement organisé à l’échelle du groupe sans avoir recours à un contrôleur global.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2022
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.