© Céline BERGER/CNRS Images
Reference
20040001_0223
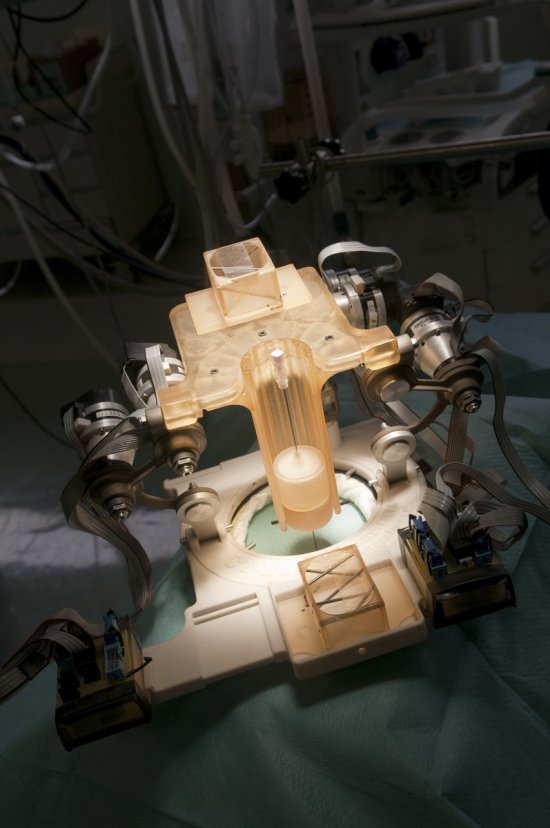
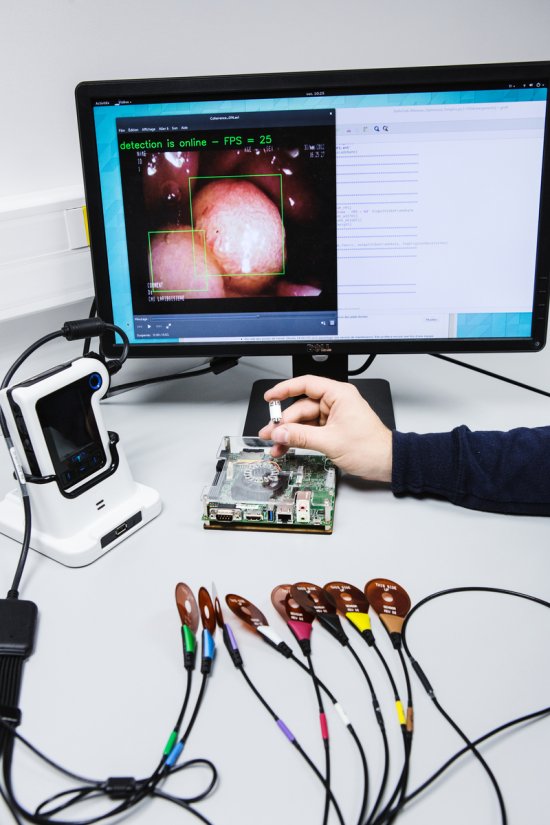
D2M2 (Direct Drive Modular Manipulator) : prototype de robot esclave destiné à des études de faisabi
D2M2 (Direct Drive Modular Manipulator) : prototype de robot esclave destiné à des études de faisabilité en chirurgie mini-invasive. Sa dynamique élevée lui permet de suivre les mouvements d'un coeur battant. D2M2 doit s'intégrer dans une plate-forme constituée de deux bras maître et deux bras esclave pour l'étude de modes avancés de coopération chirurgien-robot.
Add to my selection
Terms of use
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions