© Céline BERGER/CNRS Images
Référence
20040001_0223
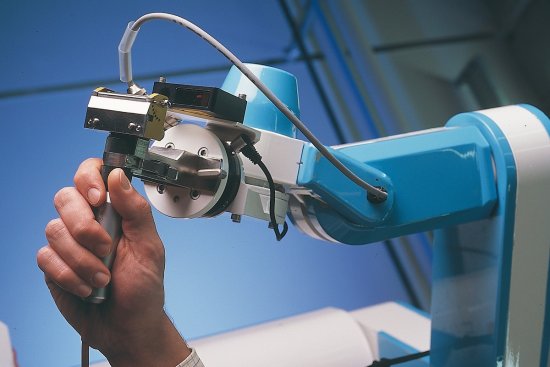
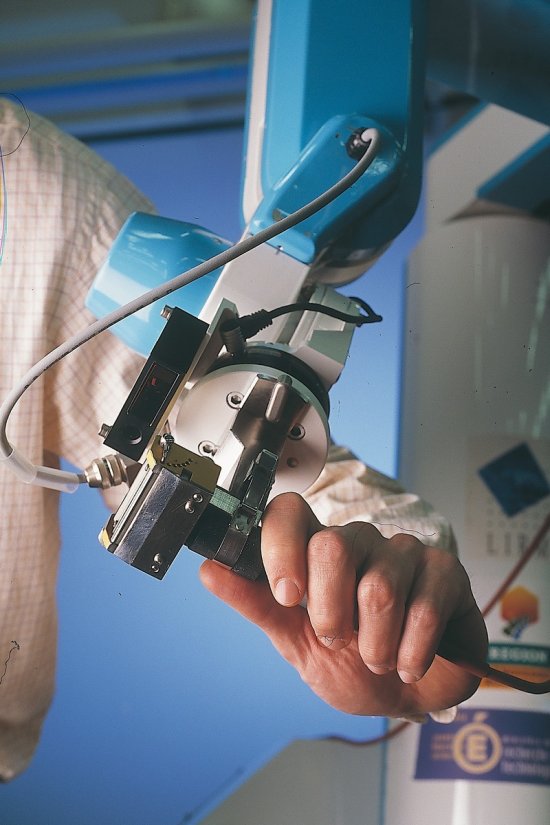
D2M2 (Direct Drive Modular Manipulator) : prototype de robot esclave destiné à des études de faisabi
D2M2 (Direct Drive Modular Manipulator) : prototype de robot esclave destiné à des études de faisabilité en chirurgie mini-invasive. Sa dynamique élevée lui permet de suivre les mouvements d'un coeur battant. D2M2 doit s'intégrer dans une plate-forme constituée de deux bras maître et deux bras esclave pour l'étude de modes avancés de coopération chirurgien-robot.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales