Programme(s)
Année de production
2024

© Cyril FRESILLON / LS2N / CNRS Images
20240049_0020
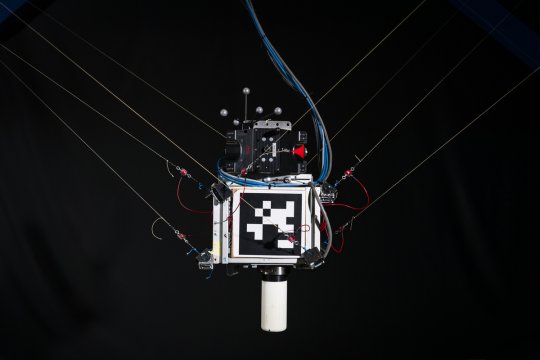
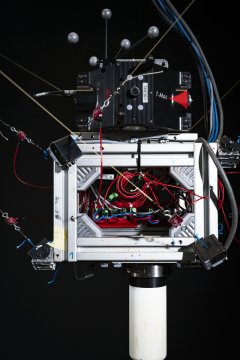
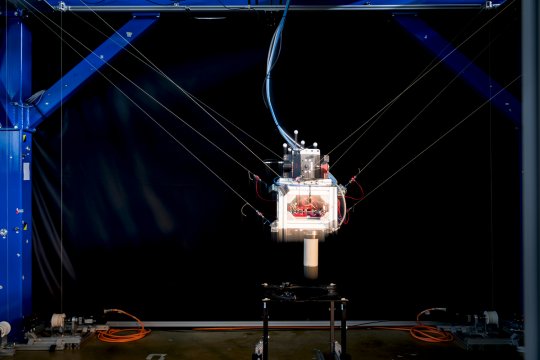
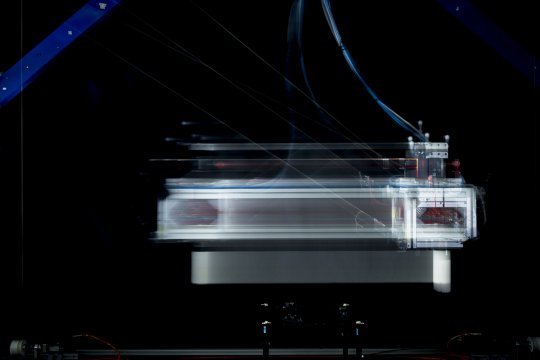
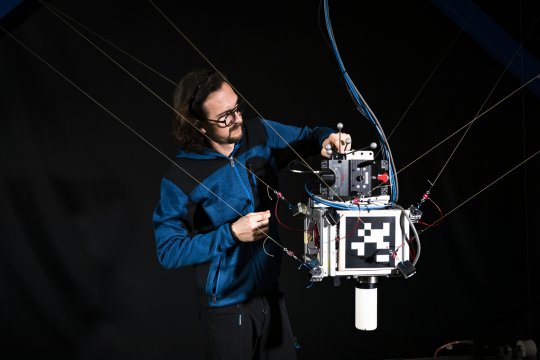
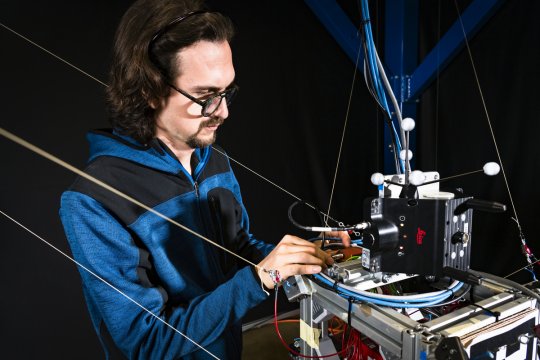
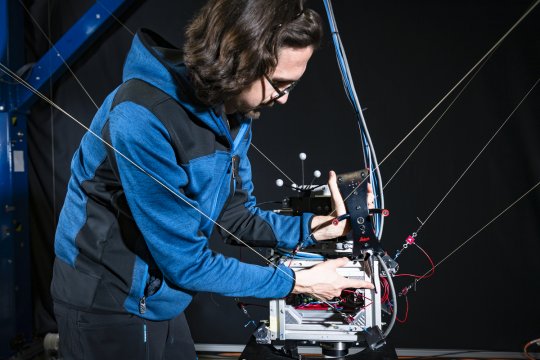
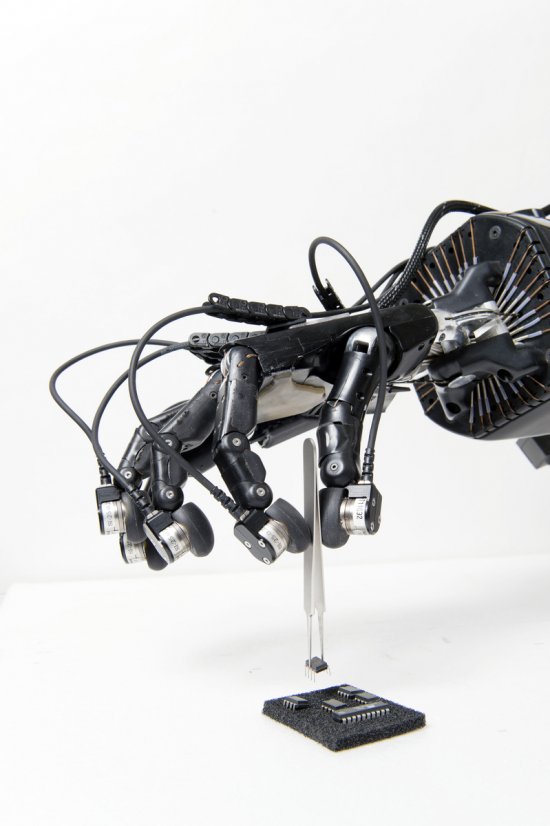
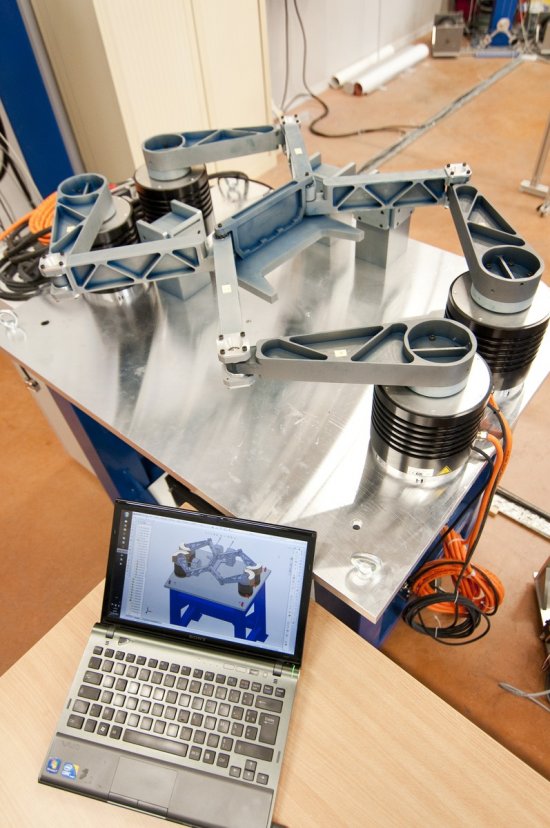
Articulation en X d'un robot inspiré du cou d'un oiseau. Il est construit à partir de modules en tenségrité (système en équilibre stable formé de barres, de câbles et de ressorts). Chaque module représente une liaison planaire entre deux vertèbres. Les barres diagonales de cette articulation sont placées dans des plans différents pour éviter des collisions. Le robot est actionné à l'aide de câbles guidés par des poulies. Certains câbles passent sur les côtés de l'articulation et appliquent donc des efforts lorsqu'ils sont mis en tension. D'autres passent parallèlement aux barres diagonales et n'appliquent pas d'effort sur l'articulation. De chaque côté de l'articulation, deux ressorts en parallèle permettent de stabiliser l'équilibre. Le robot ainsi construit est très léger et demande peu d'efforts pour se déplacer.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2024
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.