Research program(s)
Production year
2024

© Cyril FRESILLON / LS2N / CNRS Images
20240049_0020
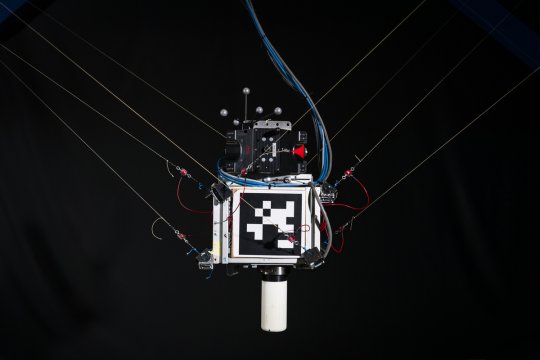
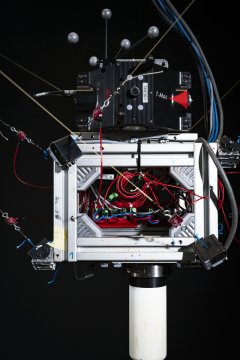
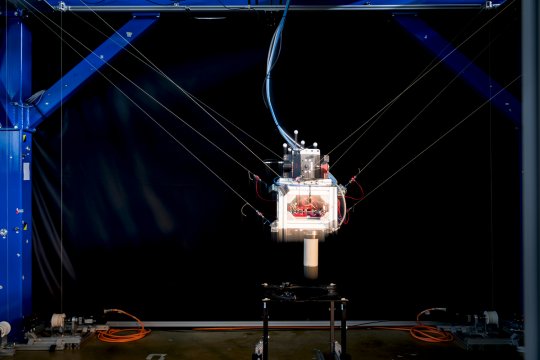
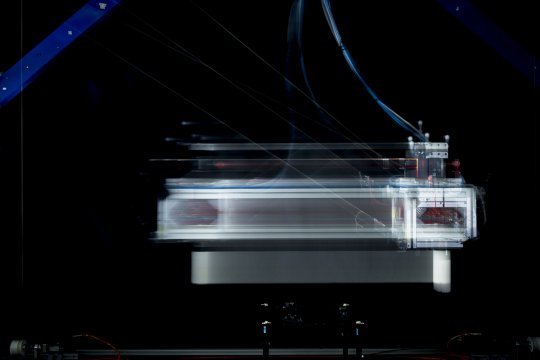
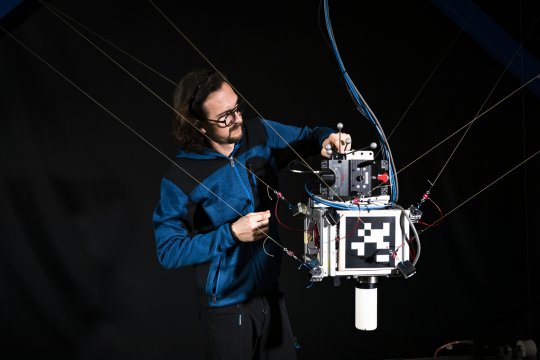
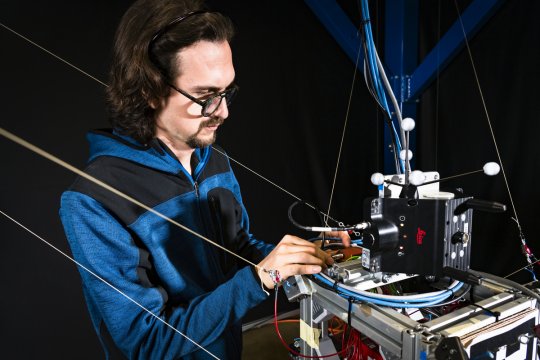
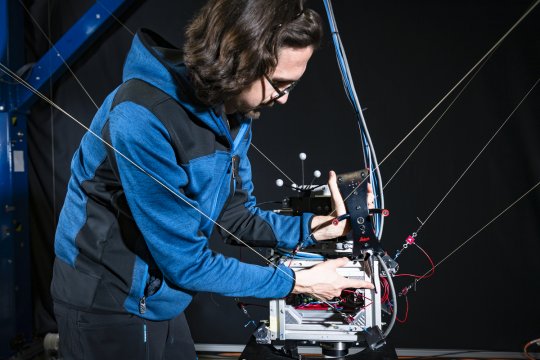
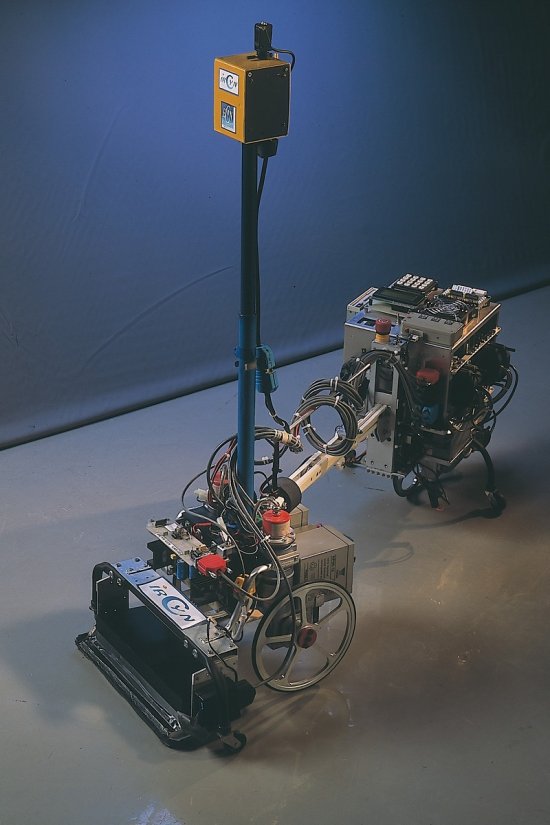
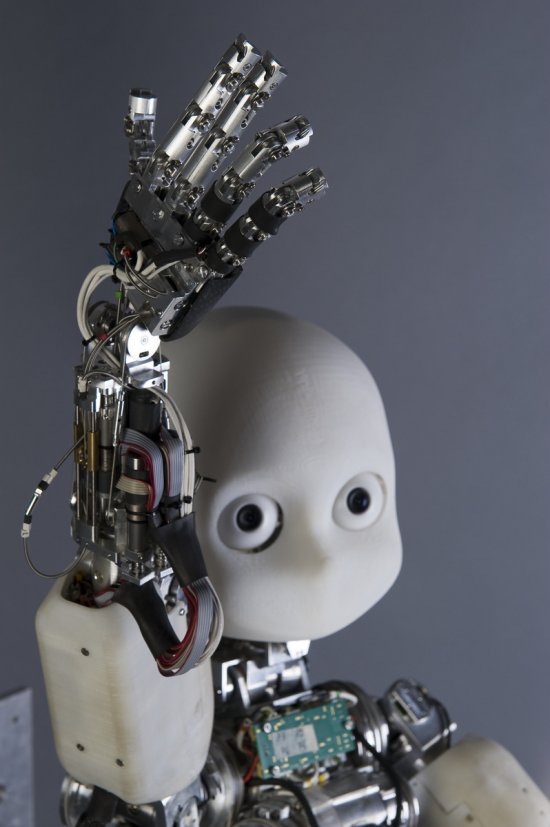
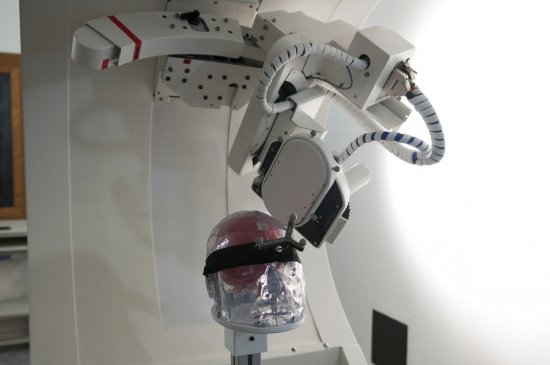
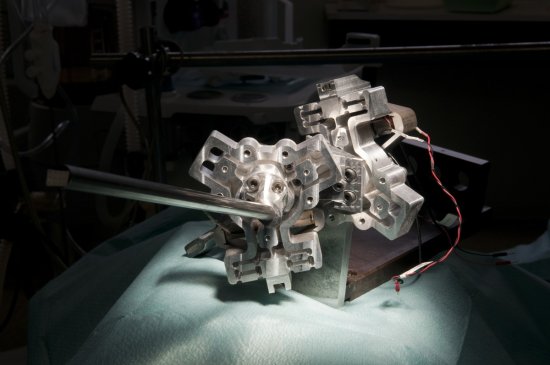
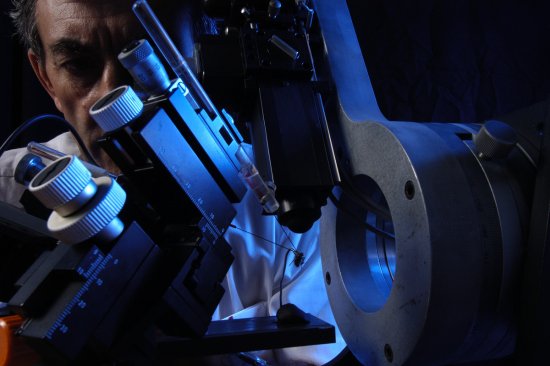
Articulation en X d'un robot inspiré du cou d'un oiseau. Il est construit à partir de modules en tenségrité (système en équilibre stable formé de barres, de câbles et de ressorts). Chaque module représente une liaison planaire entre deux vertèbres. Les barres diagonales de cette articulation sont placées dans des plans différents pour éviter des collisions. Le robot est actionné à l'aide de câbles guidés par des poulies. Certains câbles passent sur les côtés de l'articulation et appliquent donc des efforts lorsqu'ils sont mis en tension. D'autres passent parallèlement aux barres diagonales et n'appliquent pas d'effort sur l'articulation. De chaque côté de l'articulation, deux ressorts en parallèle permettent de stabiliser l'équilibre. Le robot ainsi construit est très léger et demande peu d'efforts pour se déplacer.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2024
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.