© Cyril FRESILLON/CNRS Images
Référence
20110001_0685
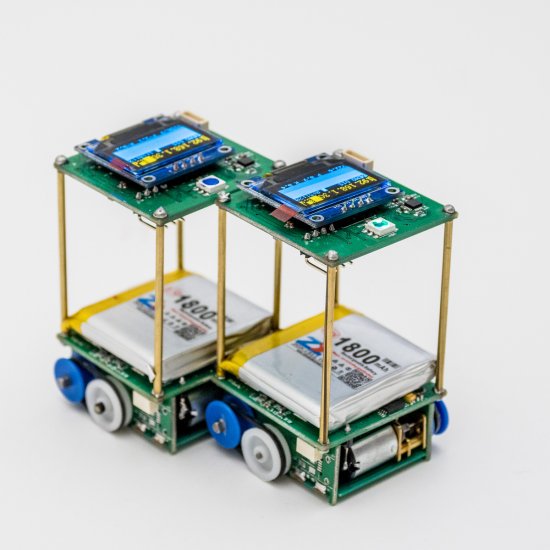
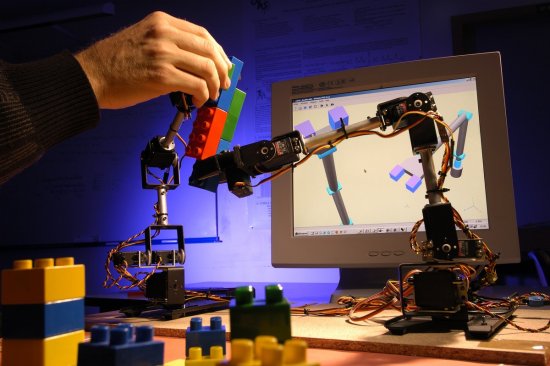
Prototype du robot DualV, un robot planaire à 3 degrés de liberté, à redondance d'actionnement et dy
Prototype du robot DualV, un robot planaire à 3 degrés de liberté, à redondance d'actionnement et dynamiquement équilibré. Il peut déplacer très rapidement des objets légers avec une grande précision, sans générer de vibrations. Les applications visées sont des applications de haute précision, dans les industries électroniques par exemple.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales