© Cyril FRESILLON/CNRS Images
Reference
20110001_0685
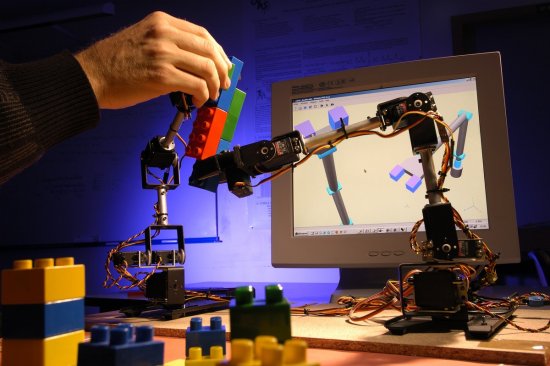
Prototype du robot DualV, un robot planaire à 3 degrés de liberté, à redondance d'actionnement et dy
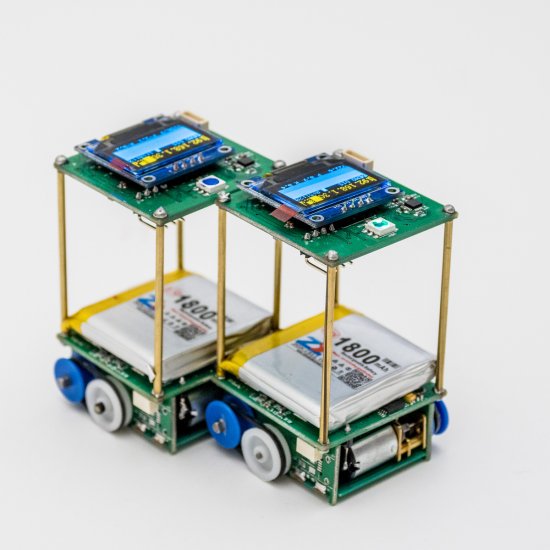
Prototype du robot DualV, un robot planaire à 3 degrés de liberté, à redondance d'actionnement et dynamiquement équilibré. Il peut déplacer très rapidement des objets légers avec une grande précision, sans générer de vibrations. Les applications visées sont des applications de haute précision, dans les industries électroniques par exemple.
Add to my selection
Terms of use
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions