
Reportage Photo
Robotique au laboratoire LS2N
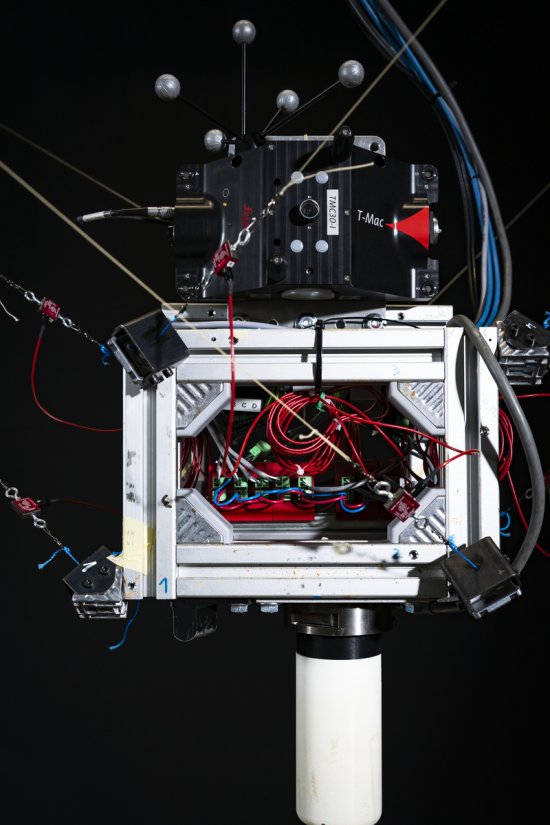
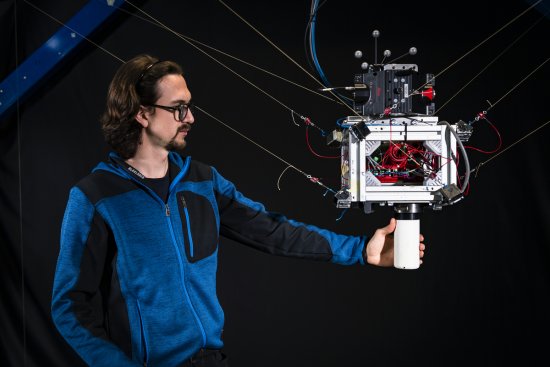
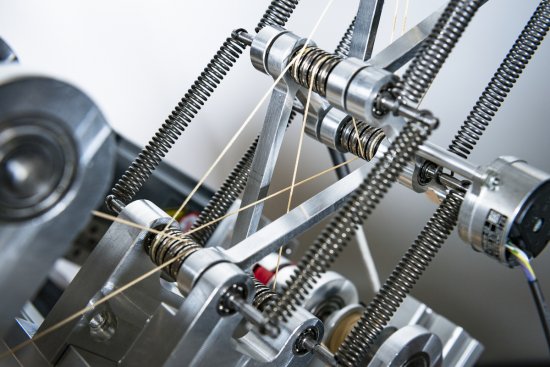
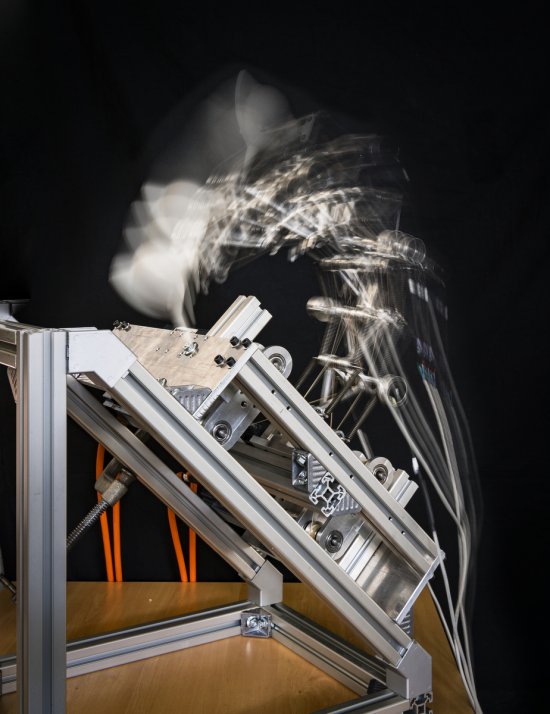
Découvrez trois robots de ce laboratoire : un robot collaboratif à câbles, un modèle reproduisant l'architecture d'une patte d'oiseau pour étudier son équilibre, et un robot inspiré du cou d'un oiseau, construit à partir de modules en tenségrité.


























CNRS Images,
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.