Année de production
2006

© Emmanuel PERRIN/CNRS Images
20060001_1474
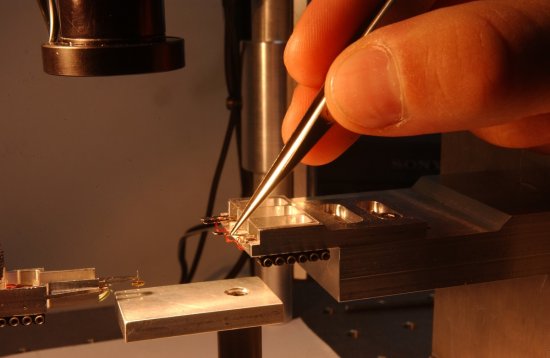
Au printemps 2006, le robot humanoïde HRP-2 est arrivé en France au LAAS (Laboratoire d'Analyse et d'Architecture des Systèmes) dans le cadre du Joint Robotics Laboratory, laboratoire franco-japonais. Les chercheurs sont en train de compléter ses aptitudes physiques par des capacités de calcul et de raisonnement lui conférant toujours plus d'autonomie dans la maîtrise de ses fonctions sensori-motrices. HRP-2 est pour cela équipé de caméras pour la vision et de capteurs d'effort et d'attitude pour la gestion de son équilibre, la planification et le contrôle de ses actions. Le technicien vérifie les articulations du poignet.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2006
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.