Année de production
2009

© Emmanuel PERRIN/LAAS/CNRS Images
20090001_0472
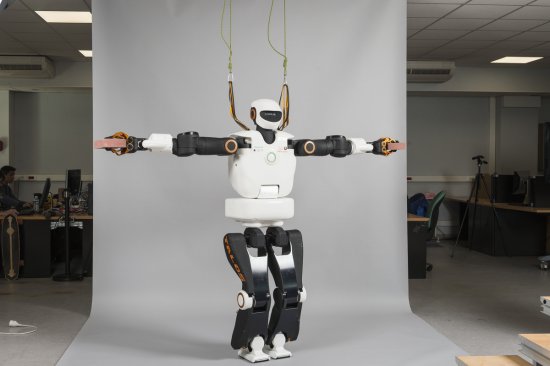
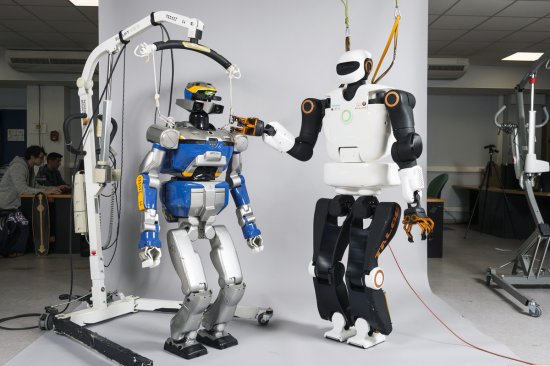
Le robot humanoïde HRP-2 constitue une plateforme support de la recherche fondamentale en robotique. Du fait de la station debout, le maintien de l'équilibre est une difficulté majeure. C'est pourquoi toute expérimentation est conduite avec un système d'assurance (comme pour un alpiniste en montagne) qui prend ici la forme d'une potence mobile que les deux chercheurs mettent en place.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2009
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.