© Emmanuel PERRIN/CNRS Images
Référence
20030001_0723
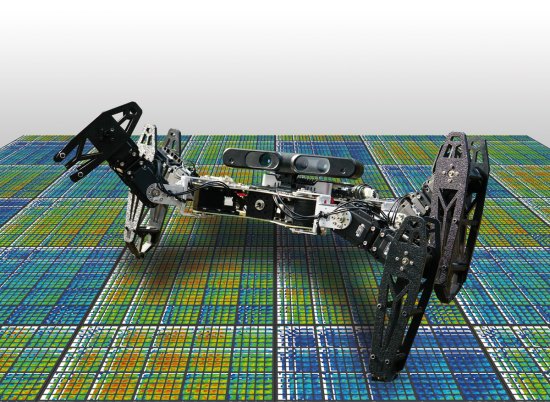
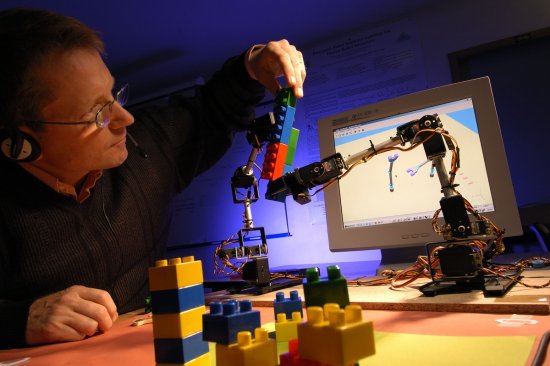
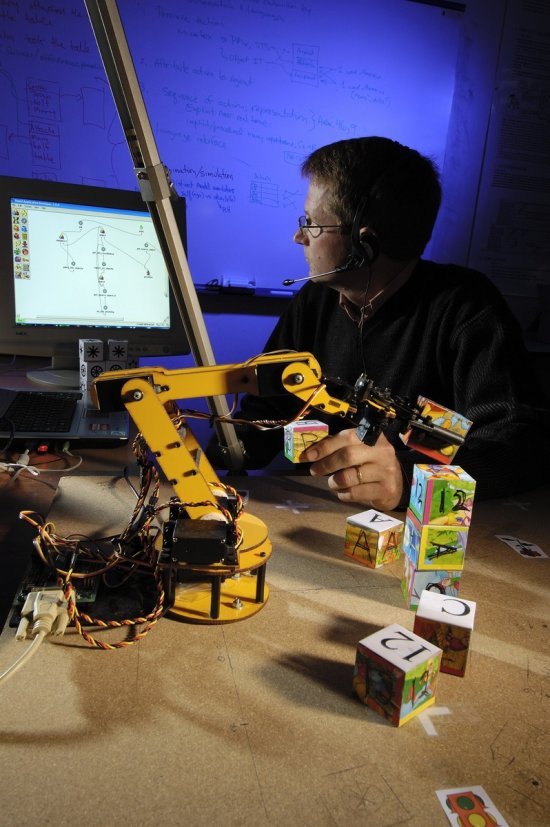
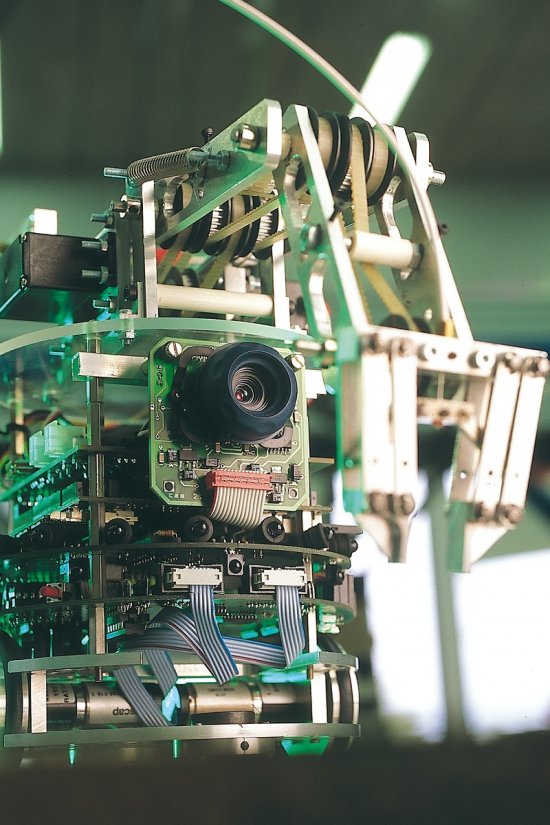
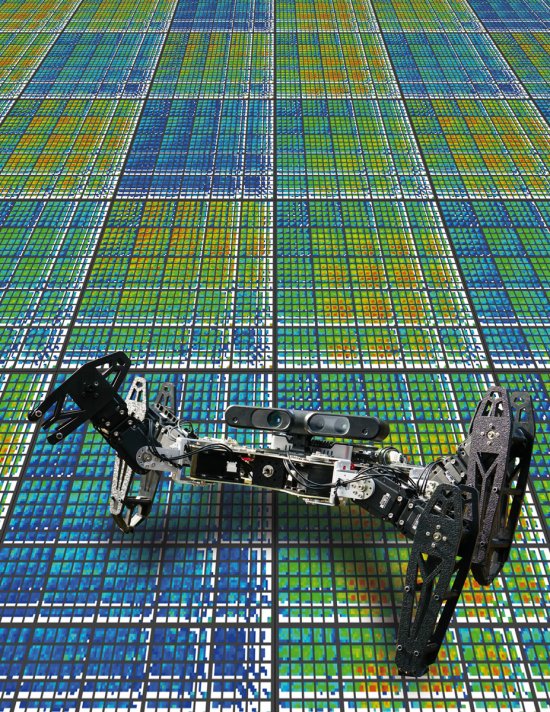
Bras manipulateur monté sur un robot de Type 1, robot mobile autonome équipé de 2 roues différentiel
Bras manipulateur monté sur un robot de Type 1, robot mobile autonome équipé de 2 roues différentielles montées sur des moteurs à courant continu, avec des codeurs incrémentaux magnétiques sur chaque moteur. Il est muni d'une ceinture de capteurs infrarouges (8 capteurs, 16 émetteurs). Il possède un processeur de type PC embarqué et il est possible de lui rajouter de nouvelles fonctionnalités. Ce robot est un agent d'une plate-forme en comportant plusieurs (robots simples, manipulateurs mobiles, robot avec caméra...).
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales