Programme(s)
Année de production
2020

© Cyril FRESILLON / PPRIME / CNRS Images
20200037_0016
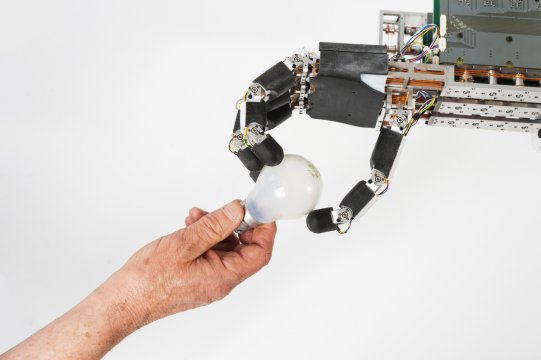
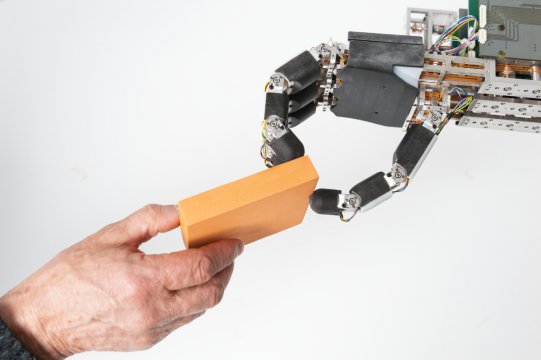
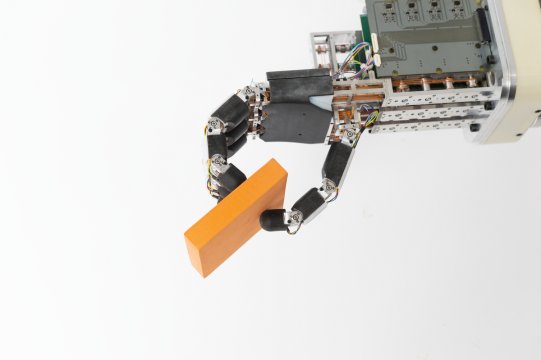
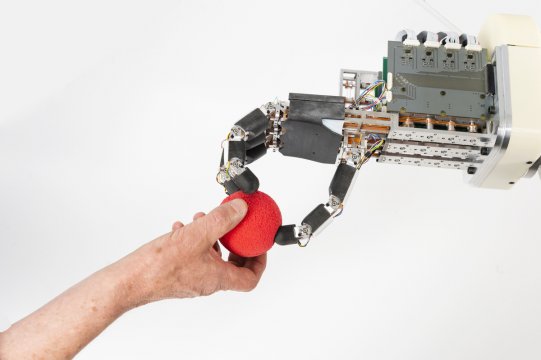
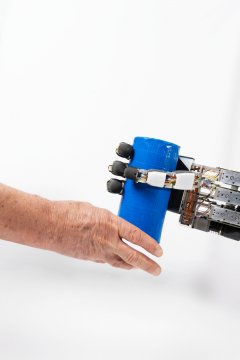
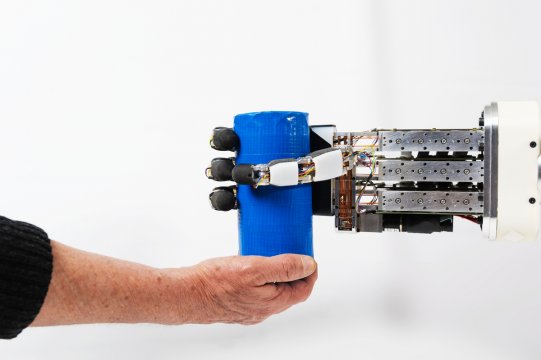
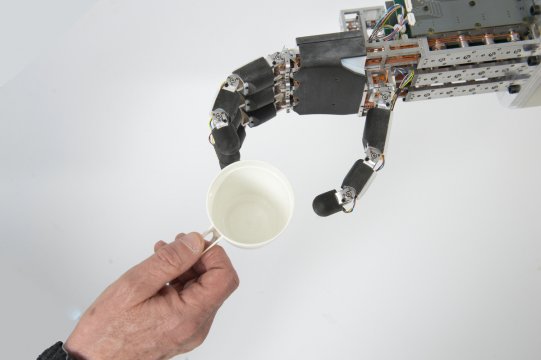
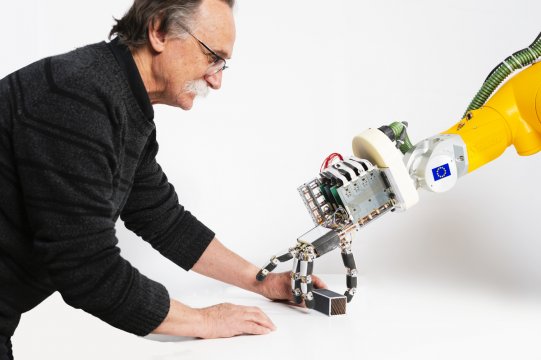
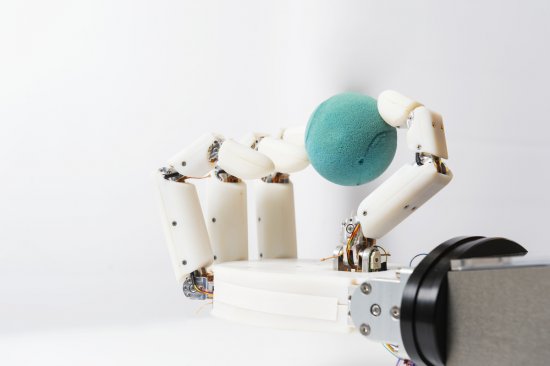
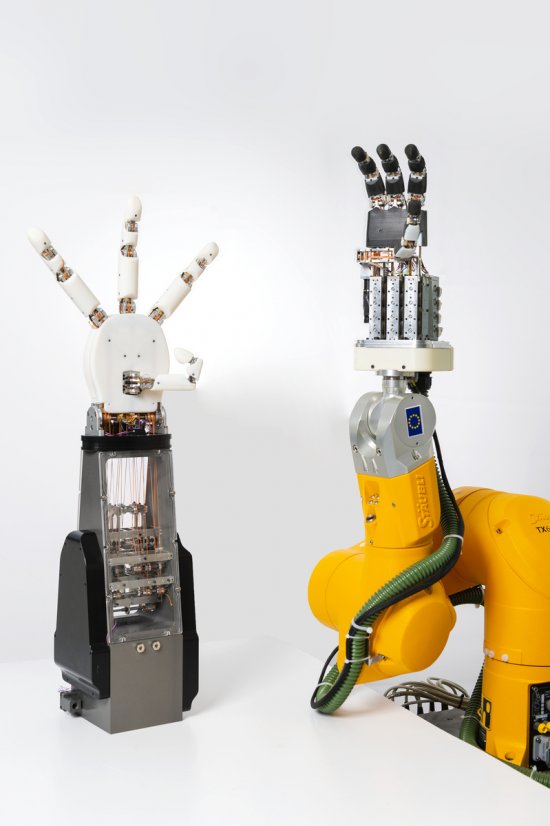
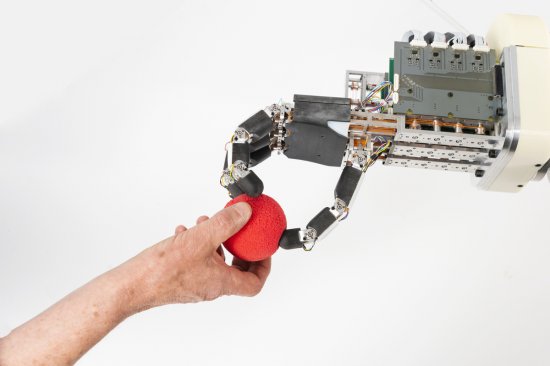
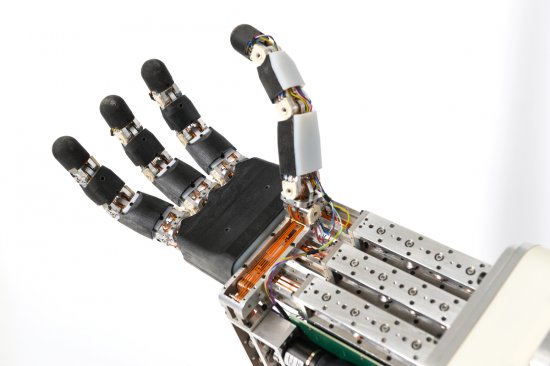
Main robotique marinisée. Ce préhenseur télé-opéré sera porté par un mini-véhicule sous-marin et pourra être utilisé en contexte de fouilles sous-marines en grande profondeur (jusqu’à 2000 m), dans des espaces difficiles d’accès. Doté de capacités de saisie adaptative, cette main fournit un retour d’effort à l’utilisateur sur tous les degrés de liberté, y compris la pression exercée par chaque doigt, afin de saisir les fragiles objets archéologiques. Elle est développée dans le cadre du projet ANR SEAHAND.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2020
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.