Production year
2017

© Cyril FRESILLON / LAAS / CNRS Images
20170051_0040
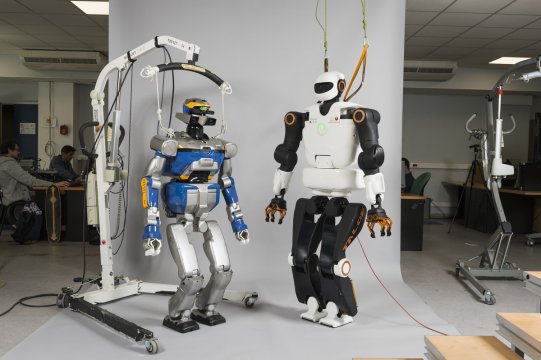
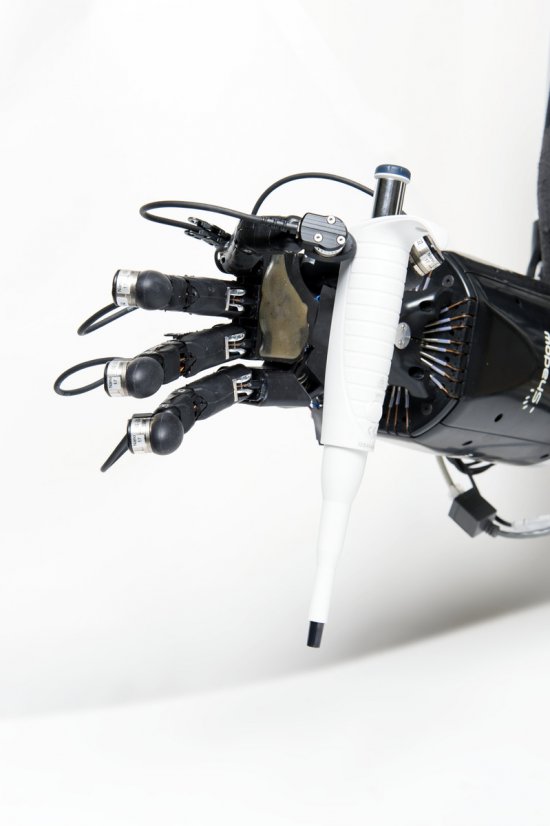
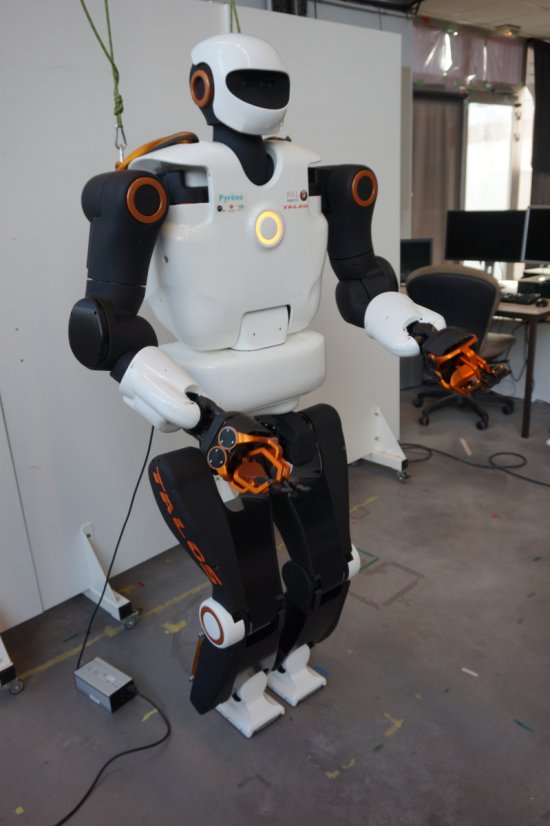
HRP-2, a humanoid robot, climbing the stairs. It is being controlled remotely by a research scientist. HRP-2, the humanoid robot forerunner of Pyrène, was developed in 2006 at the Joint Robotics Laboratory, a Franco-Japanese venture. It already demonstrates advanced computing and reasoning capacity. To achieve that, it is fitted with cameras for vision as well as effort and attitude sensors for balance management, forward planning and movement control. In 2017, Pyrène took these developments further, notably with an inertial measurement unit to manage balance, a depth-perception camera, highly robust grippers enabling it to lift heavy loads and advanced computing capacity.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2017
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.