© CNRS Audiovisuel France - 1990
Numéro de notice
71
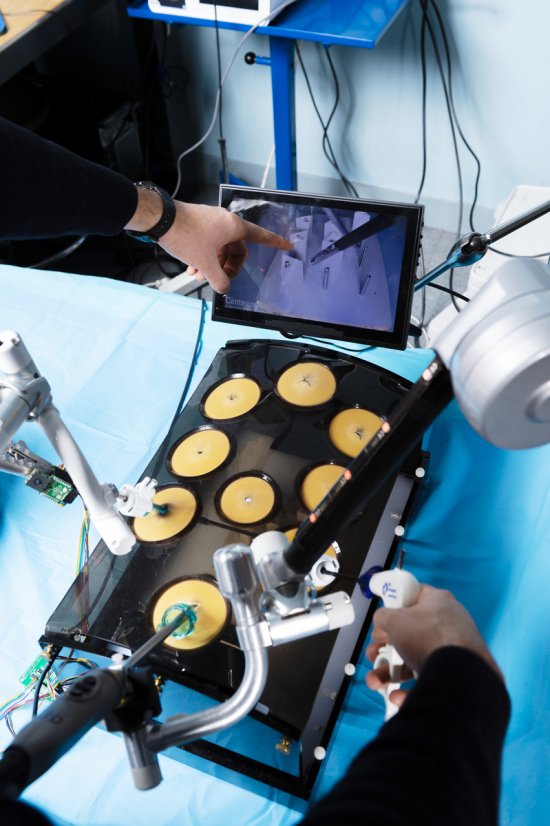
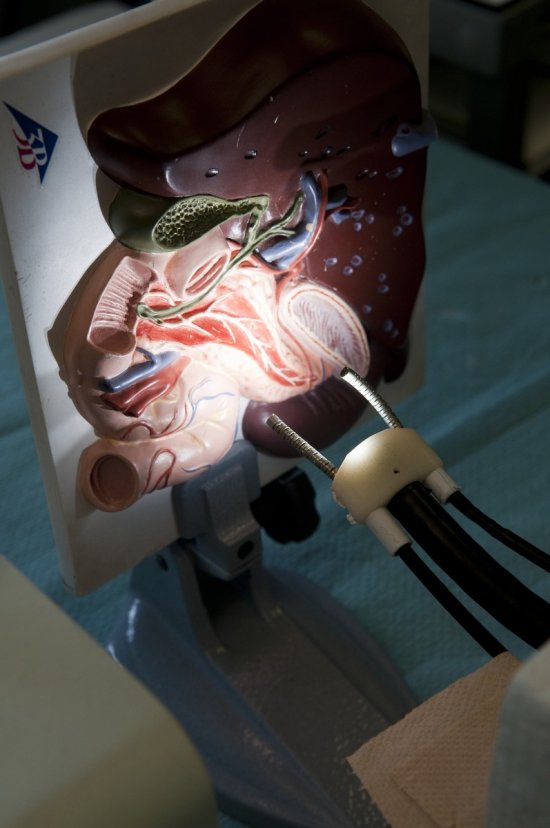
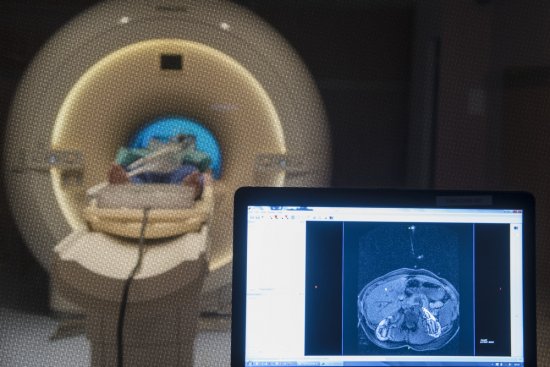
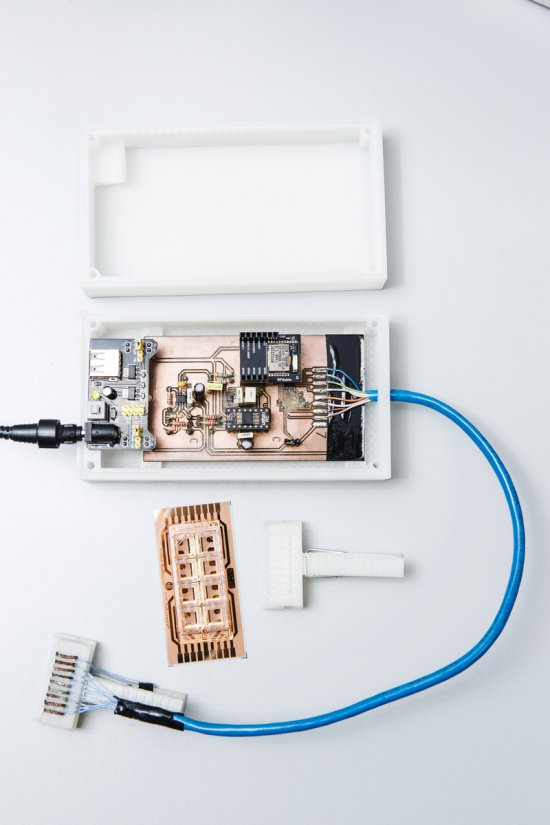
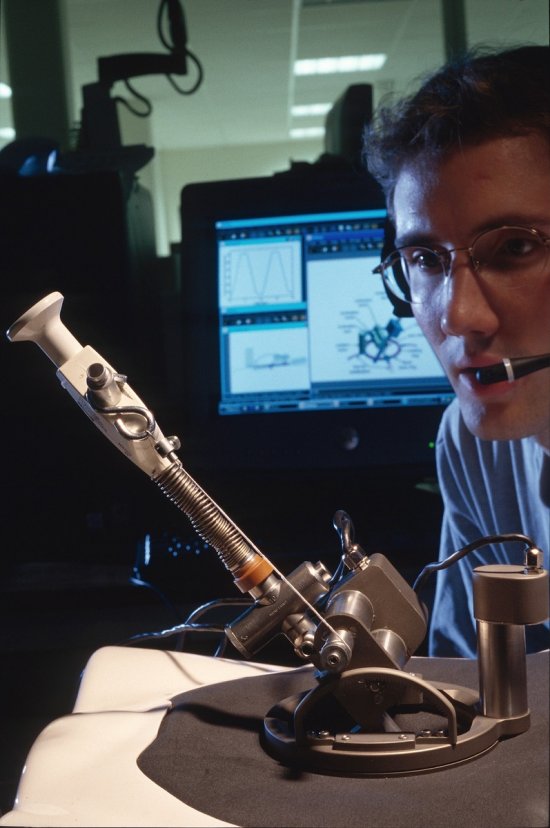
Chirurgie assistée par ordinateur
A l'hôpital de La Tronche près de Grenoble, l'équipe de neurochirurgie du Professeur Alim-Louis Benabid pratique une biopsie crânienne stéréotaxique, assistée par un robot.
Le logiciel, développé par Philippe Cinquin et Jacques Demongeot au sein de l'équipe pluridisciplinaire TIMB, permet, à partir d'imagerie RMN et X et grâce à une modélisation 3D, de piloter le robot qui optimisera la trajectoire des instruments chirurgicaux.
Durée
00:05:00
Année de production
Définition
SD
Couleur
Couleur
Son
Sonore
Version(s)
Français
Support Original
vidéo Beta SP
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales