Année de production
2020

© Cyril FRESILLON / PPRIME / CNRS Images
20200037_0021
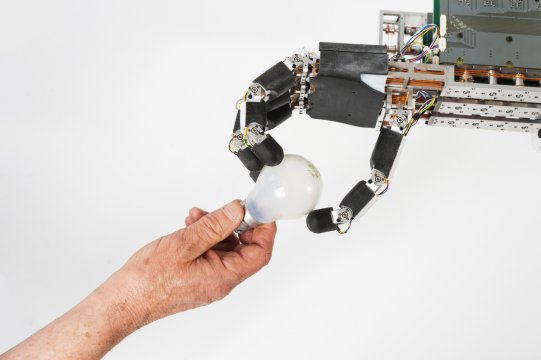
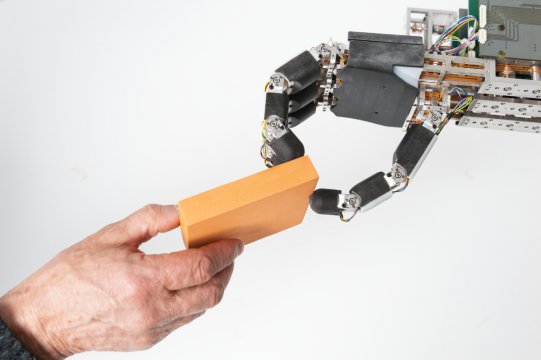
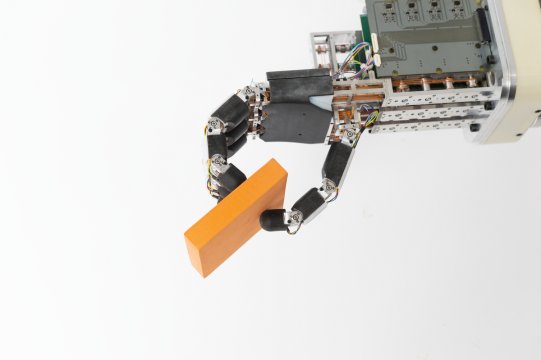
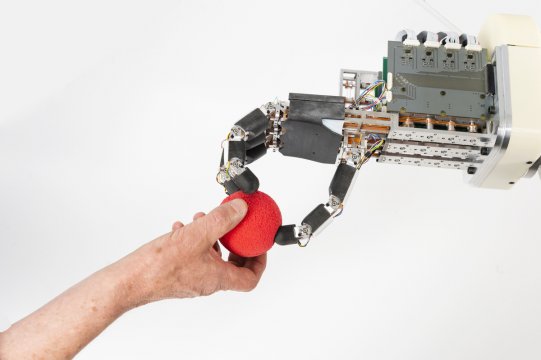
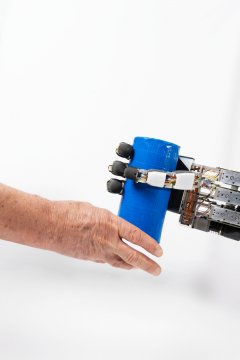
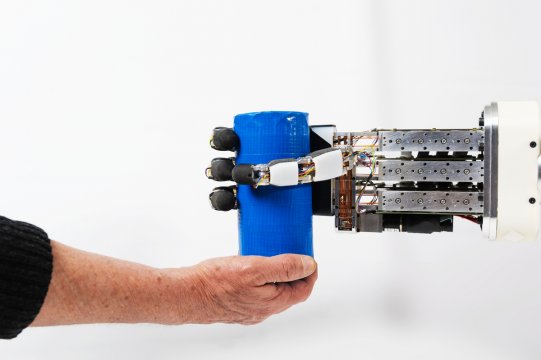
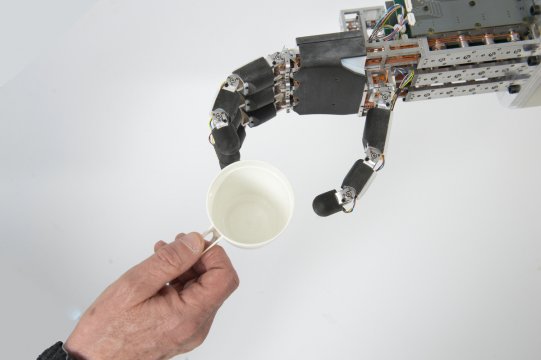
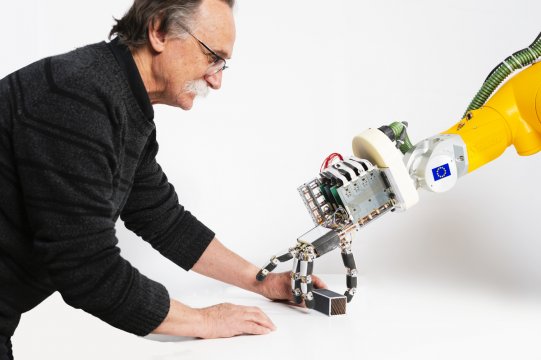
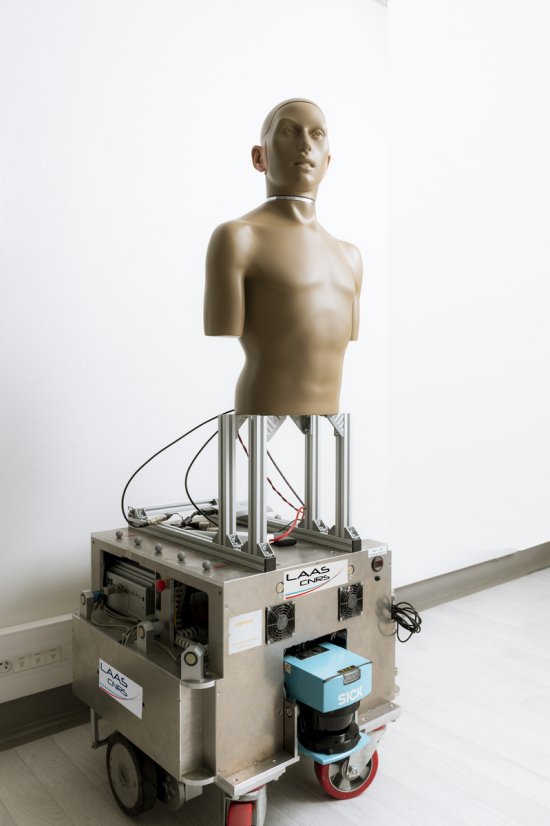
ORHRO (Open robotics humanoid robot) effectuant un mouvement de marche. ORHRO est un robot humanoïde à 15 actionneurs, à taille humaine. Il est calibré via un système de capture de mouvement (motion capture) et peut exécuter des mouvements synchronisés fins (accroupissement, balancement, piétinement et marche) pré-calculés. Le contrôle de la stabilité dynamique du robot en temps réel, par exemple pour réagir à des perturbations extérieures (irrégularités du sol, tape dans le dos, etc.), est en développement. Par ailleurs, des travaux de thèse en cours visent à aborder la conception de la partie haute du robot, en ajoutant des bras équipés de préhenseurs.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2020
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.