Année de production
2017

© Cyril FRESILLON / GIPSA-lab / CNRS Images
20170135_0014
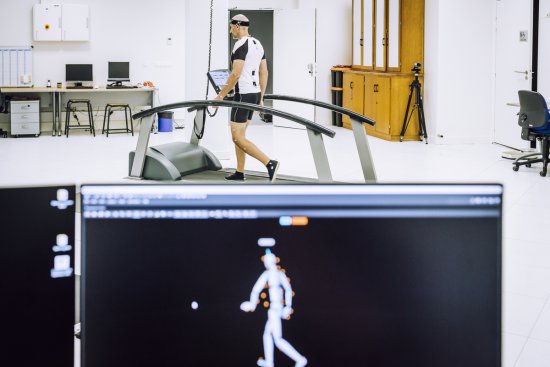
Plateforme biomécanique de stimulation visuelle virtuelle de traitement des troubles de l'équilibre. Le patient est placé face à un écran translucide plein champ sur lequel sont projetés des flux visuels composés de cercles changeant de taille et de direction. Ces stimuli visuels dynamiques en 2D et en 3D confèrent l'illusion du mouvement. Le contrôle de l’équilibre est permis par l’interaction de trois modalités sensorielles : la vision, l’équilibration, et la proprioception. Chez les personnes qui présentent des troubles de l’équilibre, le système neurosensorimoteur délaisse les informations d’équilibration (informations vestibulaires) devenues moins fiables, au profit des informations visuelles. Cette forte dépendance visuelle les pénalise dans les environnements en mouvement (foule, transports …). L'immersion dans un environnement virtuel mouvant les prive de leur béquille visuelle, obligeant le système sensorimoteur à réintégrer les signaux vestibulaires résiduels initialement délaissés. Les patients réapprennent ainsi à se détacher de la vision pour réutiliser l’information d’équilibration subsistante. Après plusieurs séances, dont le nombre varie en fonction des personnes, la dépendance visuelle s'atténue significativement.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2017
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.