Année de production
2017

© Cyril FRESILLON / GIPSA-lab / CNRS Images
20170135_0035
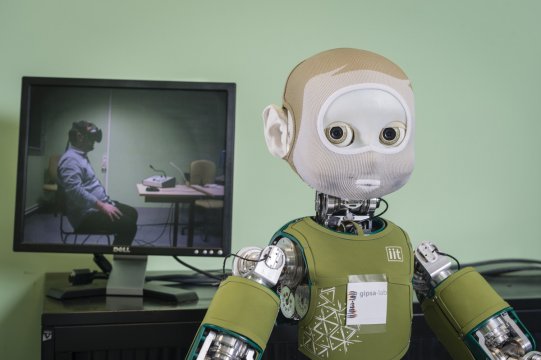
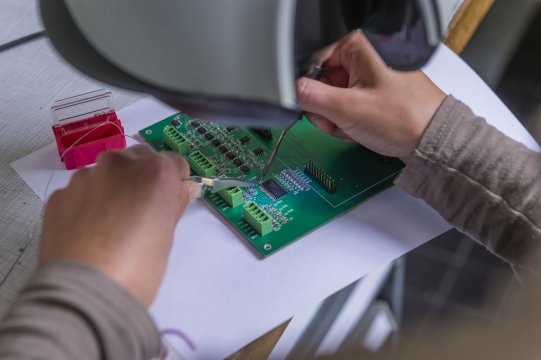
Capteurs de mouvements labiaux autour de la bouche d'un chercheur. Ces capteurs, associés à un casque de réalité virtuelle doté de capteurs du regard et de mouvements de la tête, à un microphone, mais aussi à des caméras dédiées à la capture de mouvement vont permettre au robot Nina de reproduire en temps réel tous les gestes, expressions faciales et mots prononcés par le chercheur. Ce dernier voit en stéréo à travers les yeux du robot, équipés de caméras et entend en stéréo grâce aux microphones dans les oreilles de Nina. En plus de sa possible utilisation en télé-présence immersive, cette phase de pilotage, répétée un grand nombre de fois, permet au robot d'enregistrer les mouvements subtils de l’interaction face-à-face (contact visuel, synchronisation regard/parole, points d’intérêt, tours de parole, lecture labiale…) en vue de les imiter de manière autonome par la suite. Cet apprentissage s'effectue via des algorithmes de deap learning. Nina pourra ensuite interagir de manière naturelle et socialement acceptable. Ceci lui permettra par exemple de participer à des campagnes de dépistage de problèmes de mémoire (maladie d'Alzheimer, début de démence…) en faisant passer des tests de mémoire.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2017
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.