© Jérôme CHATIN/CNRS Images
Référence
20030001_1439
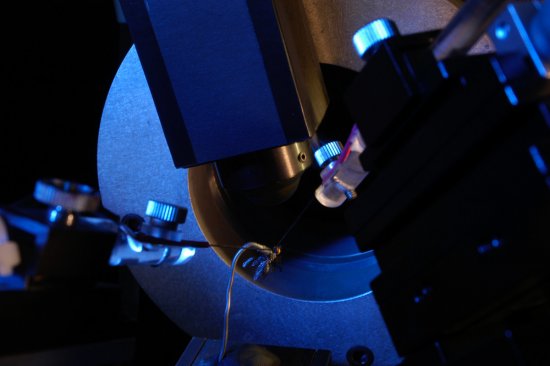
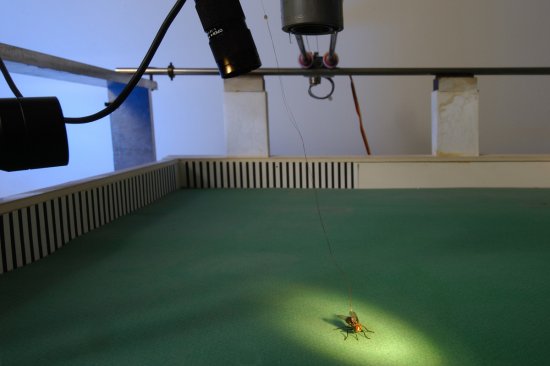
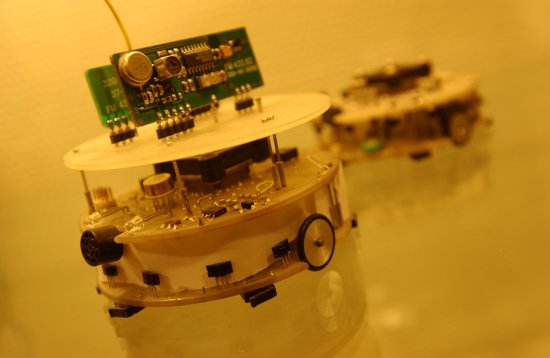
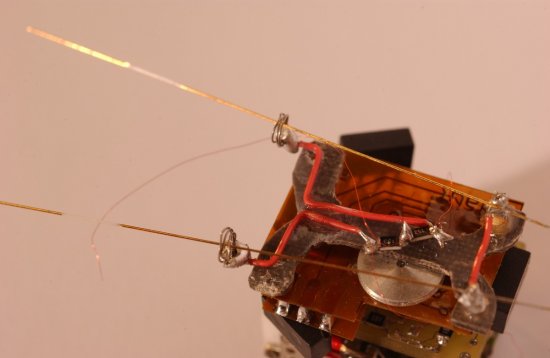
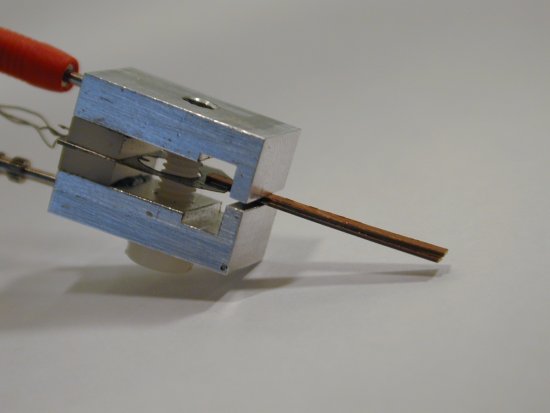
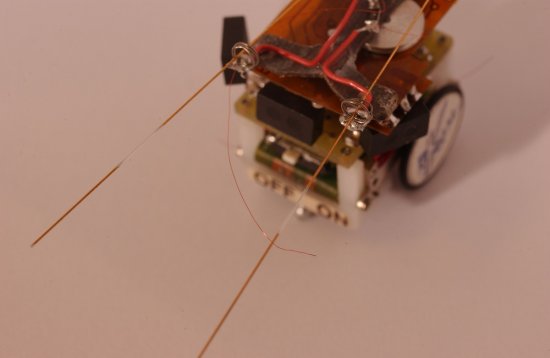
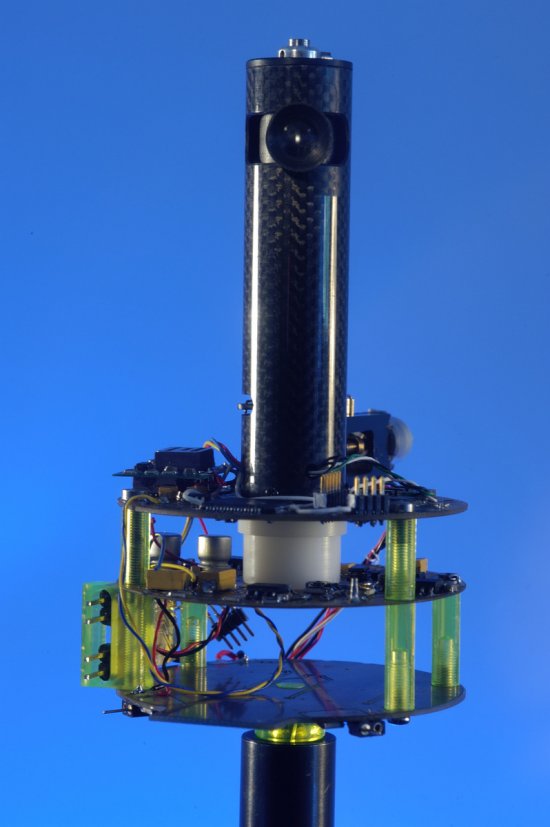
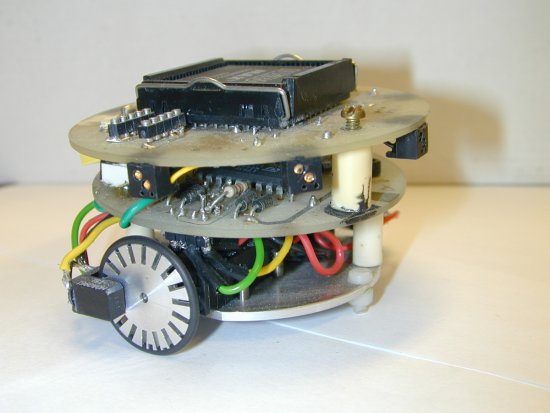
Ces deux prototypes de micro-robots de type "insecte" réalisés par microfabrication en salle blanche
Ces deux prototypes de micro-robots de type "insecte" réalisés par microfabrication en salle blanche à partir d'un substrat en silicium, possèdent six pattes, chacune intégrant deux actionneurs antagonistes de type " bilame thermique ". Malgré leurs "petites" dimensions 6 x 3,5 x 0,5 mm3 pour une masse de 2,33 mg, ces micro-robots sont potentiellement capables d'embarquer une charge de 5,3 g soit jusqu'à 2000 fois leur propre poids. Ces robots sont destinés à l'exploration de lieux confinés et/ou hostiles ou le transport de micro-objets.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales